

Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
In this tutorial, we’ll show how to root a tree.
Typically, trees are stored as hierarchical structures with one node serving as the root:
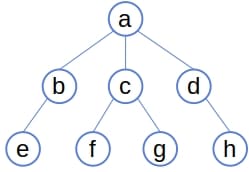
The root acts as the entry point through which we can reach all other nodes by following parent-child edges.
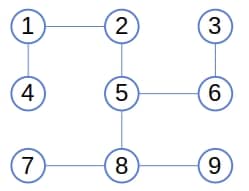
However, trees can sometimes be stored as graphs, meaning they lack a root but instead have an adjacency list or matrix.
Our goal is then to convert such a graph into a tree.
To make node  the root, we use depth-first search (DFS) to visit all the nodes starting from :
the root, we use depth-first search (DFS) to visit all the nodes starting from :
algorithm RootTree(neighbors, r):
// INPUT
// neighbors = the function returning a node's neighbors in the input graph
// r = the node at which we want to root the tree
// OUTPUT
// T = a tree spanning all the nodes in the input graph and rooted at r
T <- make an empty tree
T.root <- r
leaves <- make an empty stack
leaves.push(T.root)
while leaves is not empty:
u <- leaves.pop()
for v in neighbors(u):
Include v to u.children
leaves.push(v)
return TThe  stack contains the candidate leaves of the tree. These nodes are the ones whose children we know nothing about yet. In each iteration, we check the deepest candidate to determine if it has any children. If it does, we add them to the stack. Otherwise, we confirm the node as a leaf. In either case, we remove the node from the stack because it’s no longer a candidate.
stack contains the candidate leaves of the tree. These nodes are the ones whose children we know nothing about yet. In each iteration, we check the deepest candidate to determine if it has any children. If it does, we add them to the stack. Otherwise, we confirm the node as a leaf. In either case, we remove the node from the stack because it’s no longer a candidate.
Once we traverse all the vertices, we’ll have a tree spanning the entire input.
Let’s root the following graph at node 5:
At first, the stack contains only the root, node 5. Then, we get its children, nodes 2, 6, and 8, add them to the tree, and push them onto the stack. Afterward, we pop node 2, visit its child, add it to the tree, and push it onto the stack. Continuing this process, we get the following:
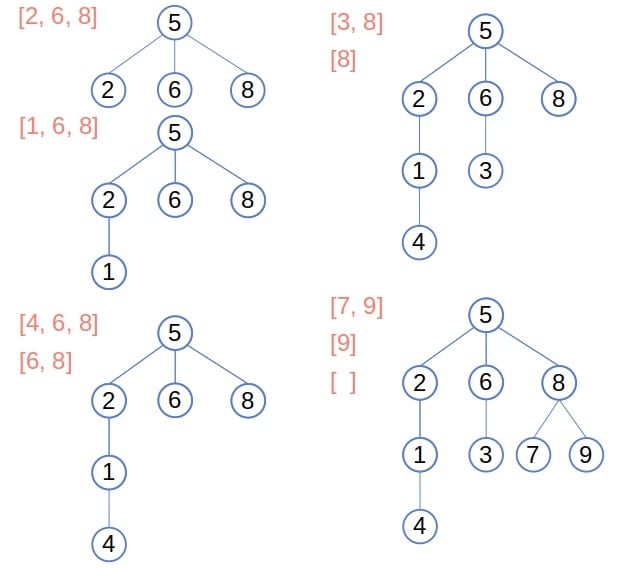
The algorithm stops when the stack becomes empty.
Let  be the maximal number of children a node can have and
be the maximal number of children a node can have and  the total number of nodes. The time and space complexity depend on the way the nodes are stored initially.
the total number of nodes. The time and space complexity depend on the way the nodes are stored initially.
If we use the adjacency lists, we’ll traverse each edge twice and visit each node at most  times. That’s because the
times. That’s because the  function iterates only over the nodes of the given node. If is constant with respect to , the time complexity is
function iterates only over the nodes of the given node. If is constant with respect to , the time complexity is  since a tree with nodes has
since a tree with nodes has  edges. The space complexity will also be .
edges. The space complexity will also be .
However, if we use the adjacency matrix, we’ll take  memory to store the nodes. The function will then traverse all the bits in the corresponding row to find the neighbors of
memory to store the nodes. The function will then traverse all the bits in the corresponding row to find the neighbors of  . So, the time complexity will also be .
. So, the time complexity will also be .
Our algorithm assumes the root is already chosen. It’s often a good idea to choose the center of the tree as its root, as that minimizes the resulting tree’s height.
DFS is effective only if the input nodes form a tree. If there are cycles, DFS gets stuck in a loop. To avoid that, we can mark each node the first time we add it to the tree.
Another issue is that the nodes might be disconnected. In this case,  will span only the nodes in the same component as the chosen root node.
will span only the nodes in the same component as the chosen root node.
In this article, we showed how to root a tree using the depth-first traversal with a time complexity of . However, if the input nodes don’t form a tree, this approach won’t work without modifications.