

Yes, we're now running our only Summer Sale. All Courses are 30% off until 20th July, 2026:
Binary Search Trees vs. AVL Trees: the Complexity of Construction
Last updated: March 18, 2024
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
1. Introduction
In this tutorial, we’ll explain the difference in time complexity between binary-search and AVL trees. More specifically, we’ll focus on the expected and worst-case scenarios for constructing the trees out of arrays.
When it comes to space complexity, both trees require  space to be constructed regardless of the case analyzed.
space to be constructed regardless of the case analyzed.
2. Binary Search Trees and AVL Trees
In a binary search tree (BST), each node’s value is  than its left descendants’ values and
than its left descendants’ values and  than the values in its right sub-tree.
than the values in its right sub-tree.
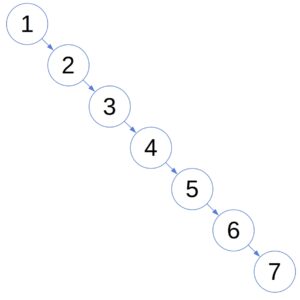
The goal of BSTs is to allow efficient searches. Although that’s mostly the case, the caveat is that a BST’s shape depends on the order in which we insert its nodes. In the worst case, a plain BST degenerates to a linked list and has an search complexity:
Balanced trees were designed to overcome that issue. While building a balanced tree, we maintain the shape suitable for fast searches. In particular, when it comes to AVL trees, the heights of each node’s left and right sub-trees differ at most by 1:
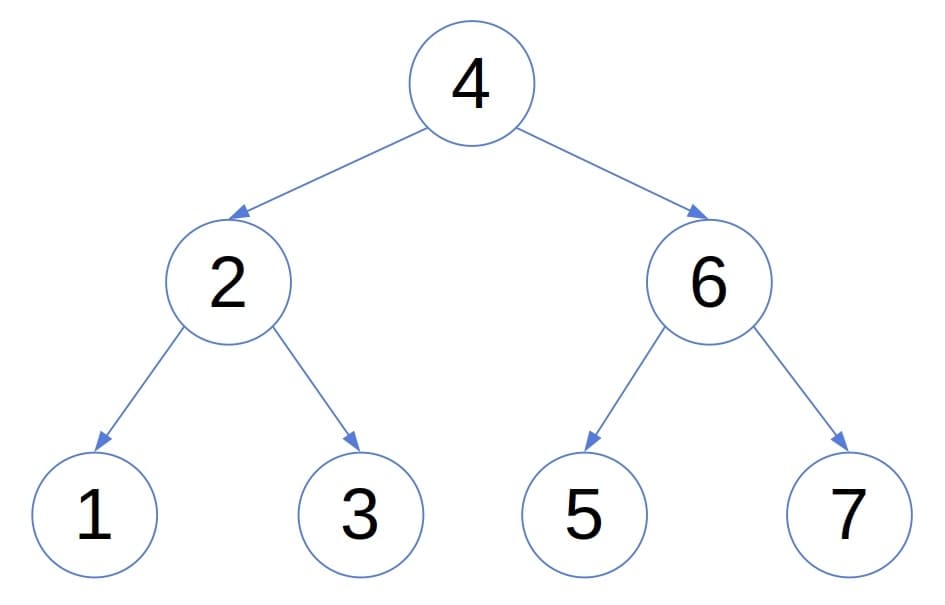
That property implies that an AVL tree’s height is  . To ensure it, we need to re-balance the tree if an insertion unbalances it, which incurs computational overhead.
. To ensure it, we need to re-balance the tree if an insertion unbalances it, which incurs computational overhead.
Here, we’ll analyze the complexity of building an AVL tree and a BST out of an array  of comparable objects:
of comparable objects: ![A = [a_1, a_2, \ldots, a_n]](/wp-content/ql-cache/quicklatex.com-0142fd6d512a316d237b10556922f943_l3.svg "Rendered by QuickLaTeX.com")
3. The Worst-Case Complexity Analysis
Let’s first analyze the worst-case scenario. For both BST and AVL trees, the construction algorithms follow the same pattern:
algorithm ConstructTree(A):
// INPUT
// A = [a1, a2, ..., an] - the numerical array holding the future nodes' values
// OUTPUT
// An AVL tree or a BST containing a1, a2, ..., an
T <- make an empty BST or AVL tree
Set a1 as the root of T
for i <- 2 to n:
x <- find the future parent node by searching for ai in T
if ai < x.value:
x.left <- Node(ai)
else:
x.right <- Node(ai)
return TThe algorithm starts with an empty tree and inserts the elements of successively until processing the whole array. To place  , the algorithm first looks for it in the tree containing
, the algorithm first looks for it in the tree containing  . The search procedure identifies the node
. The search procedure identifies the node  whose child should become. Then, the algorithm inserts as the left or right child of depending on whether
whose child should become. Then, the algorithm inserts as the left or right child of depending on whether  or
or  .
.
3.1. Constructing a BST
In the worst-case scenario, when the insertion order  skews the tree, the insertion into a BST is a linear-time operation.
skews the tree, the insertion into a BST is a linear-time operation.
Since the tree is essentially a list, adding to the tree in the worst case requires traversing all the previously attached elements:  . In total, we follow
. In total, we follow  pointers:
pointers:
(1) 
So, constructing a BST takes a quadratic time in the worst case.
3.2. Constructing an AVL Tree
Insertion into an AVL tree takes log-linear time. The reason is that an AVL tree’s height is logarithmic in the number of nodes, so we traverse no more than  edges when inserting in the worst case. In total:
edges when inserting in the worst case. In total:
(2) 
The worst-case complexity of building an AVL tree is  . So, although insertions can trigger re-balancing, an AVL tree is still faster to build than an ordinary BST.
. So, although insertions can trigger re-balancing, an AVL tree is still faster to build than an ordinary BST.
4. The Expected Complexity
In the following analyses, we assume that all  insertion orders of
insertion orders of ![A=[a_1, a_2, \ldots, a_n]](/wp-content/ql-cache/quicklatex.com-34117bf9e043b106e46ab834ce684c72_l3.svg "Rendered by QuickLaTeX.com") are equally likely.
are equally likely.
4.1. Binary Search Trees
A single insertion’s complexity depends on the average node depth in a BST. We can calculate it as the sum of the nodes’ depths divided by the number of nodes ( ).
).
If the root’s left sub-tree has  nodes, the right one contains
nodes, the right one contains  vertices. Then, the expected sum of the depths in such a BST,
vertices. Then, the expected sum of the depths in such a BST,  , is:
, is:
(3) 
We add  because the root node increases the depths of all the other nodes by 1.
because the root node increases the depths of all the other nodes by 1.
Since all permutations of are equally probable, follows the uniform distribution over  . So, the expected depth of a node in a BST with nodes is:
. So, the expected depth of a node in a BST with nodes is:
(4) 
Solving the recurrence, we get  . So, the expected node depth in a BST with nodes is
. So, the expected node depth in a BST with nodes is  . Hence, starting from an empty tree and inserting
. Hence, starting from an empty tree and inserting  , we perform
, we perform  steps:
steps:
(5) 
Therefore, in the average case, the construction of a BST takes a log-linear time.
4.2. AVL Trees
Since the AVL trees are balanced and do not depend on the insertion order, the tree depth is always . Moreover, an AVL tree has at most  nodes at depth
nodes at depth  . So, the average node depth is bounded by:
. So, the average node depth is bounded by:
(6) 
Since:
![\[\sum_{k=0}^{d} k 2^k = 2^{d+1}(d-1)+2\]](/wp-content/ql-cache/quicklatex.com-86a6a1ef7b8e545d456bfa0a412b94e0_l3.svg "Rendered by QuickLaTeX.com")
the expected node depth in an AVL tree is:
(7) 
Since the average node depth is the same as in a BST, Equation (5) holds for AVL trees as well. So, building an AVL tree is also a log-linear operation in the expected case.
5. Conclusion
In this article, we compared the construction complexities of Binary Search Trees (BSTs) and AVL trees. In the worst-case scenario, building an AVL tree takes time, whereas constructing a BST has an  complexity.
complexity.
However, both trees take a log-linear time in the expected case.