

Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
In this tutorial, we’ll learn about balanced binary trees.
In particular, we’ll see why such trees come in handy and explore three types of them. We’ll talk about the AVL trees, the red-black trees, and weight-balanced trees. Each type has its definition of balance.
We call a tree binary if each node in it has at most two children. A node’s left child with descendants forms the node’s left sub-tree. The definition of the right sub-tree is similar.
Although suitable for storing hierarchical data, binary trees of this general form don’t guarantee a fast lookup. Let’s take as the example the search for number 9 in the following tree:
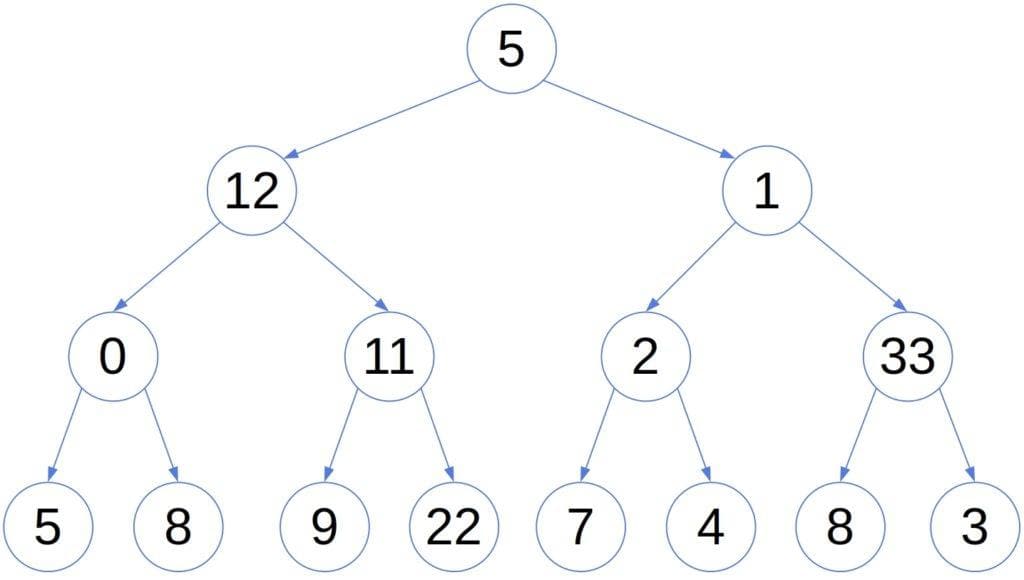
Whichever node we visit, we don’t know if we should traverse the left or the right sub-tree next. That’s because the tree hierarchy doesn’t follow the relation  .
.
So, in the worst case, a search takes  time, where
time, where  is the number of nodes in the tree.
is the number of nodes in the tree.
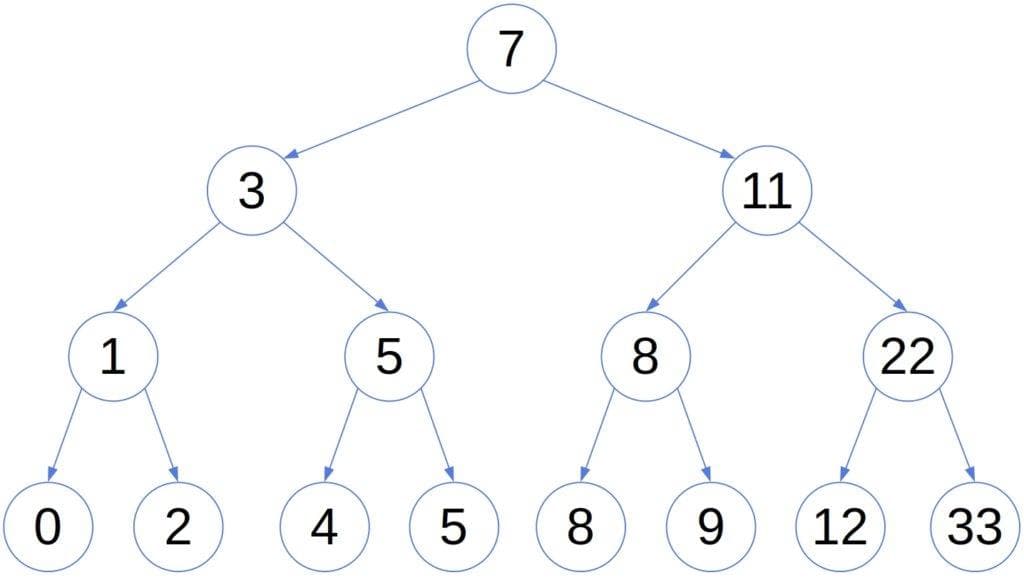
We solve this problem by turning to a special type of binary tree called binary search tree (BST). For each node  in a BST, all the nodes in the left sub-tree of contain the values that are strictly lower than . Further, all the nodes in the ‘s right sub-tree are
in a BST, all the nodes in the left sub-tree of contain the values that are strictly lower than . Further, all the nodes in the ‘s right sub-tree are  . For instance:
. For instance:
The order the tree maintains allows us to prune it during a lookup. Suppose we visit the node  while searching for
while searching for  . We can disregard the
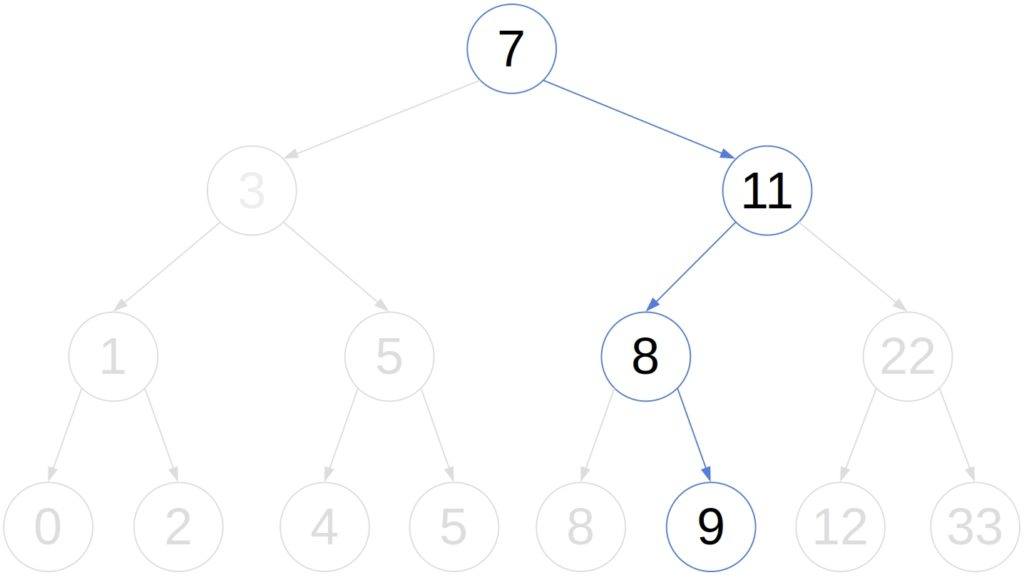
. We can disregard the  ‘s left sub-tree and focus only on the right, which speeds up the search. This is how we find 9 in the above search tree:
‘s left sub-tree and focus only on the right, which speeds up the search. This is how we find 9 in the above search tree:
However, the worst-case complexity of the search is still . It occurs if we construct the tree from a sorted array, in which case the tree has height  and degenerates to a linked list. Since insertion and deletion include the search, all operations commonly performed on a BST are in the worst case. So, it’s the height of the tree that determines the complexity. That’s where balanced trees come in. They’re a special type of binary search tree.
and degenerates to a linked list. Since insertion and deletion include the search, all operations commonly performed on a BST are in the worst case. So, it’s the height of the tree that determines the complexity. That’s where balanced trees come in. They’re a special type of binary search tree.
A balanced tree is a search tree that doesn’t just maintain the order between nodes. It also controls its height, making sure it stays  after insertion or deletion.
after insertion or deletion.
To do that, a balanced tree must re-balance itself after we add or delete a node. That causes a computational overhead and complicates the algorithms for insertion and deletion. However, that’s the price we’re ready to pay for a logarithmic-height search tree with fast search, insertion, and deletion operations. We won’t cover the re-balancing algorithms in this article.
There are several types of such trees. They require all their nodes to be balanced, but the notion of balance differs from type to type.
In an AVL tree, we call a node balanced if the heights of its left and right sub-trees differ at most by 1. So, a search tree with root is an AVL tree if all its nodes are balanced in the AVL sense (empty search trees, with height 0, are trivially balanced):
(1)
For example:
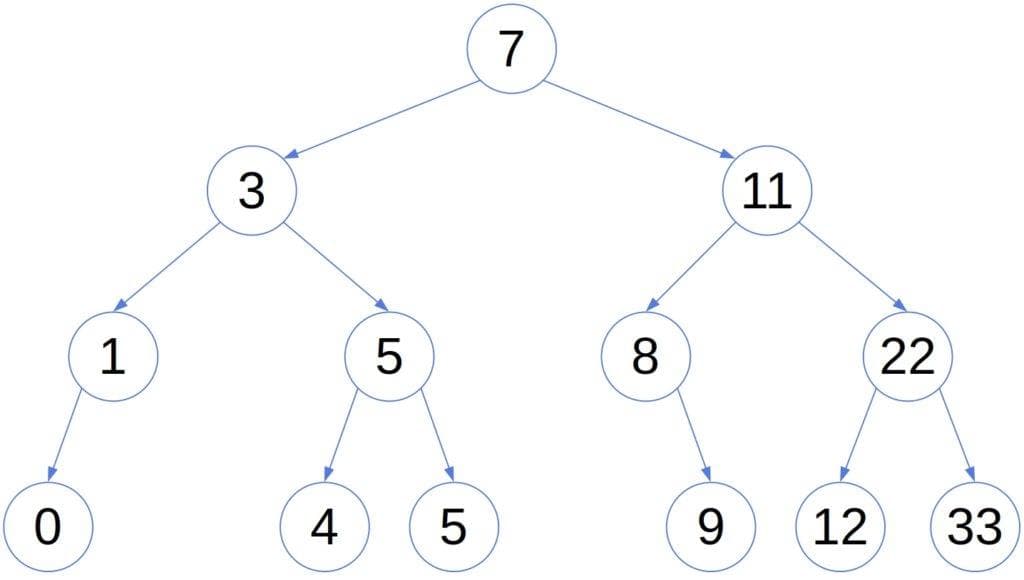
A consequence of this definition of balance is that an AVL tree’s height is  in the worst case.
in the worst case.
An AVL tree is balanced the least if the heights of all the sibling sub-trees differ by one. For instance:
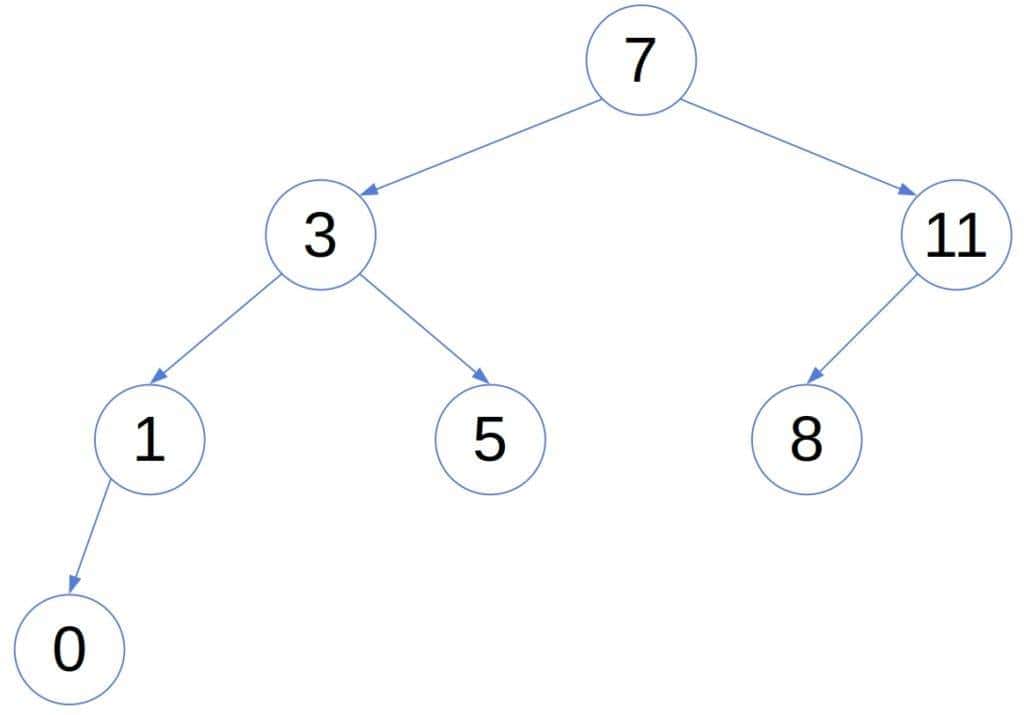
That’s the worst-case structure of an AVL tree. Adding a node to a least-balanced AVL tree, we either get a non-AVL tree or balance one of its nodes. The same goes for deleting a node. So, such AVL trees are minimal: no AVL tree of the same height has fewer nodes.
Even if we switch the node’s left and right sub-trees, the tree will remain balanced. So, we’ll assume that the left sub-trees have more nodes. Then, if  is the number of nodes of a minimal AVL tree with height
is the number of nodes of a minimal AVL tree with height  , we have:
, we have:
![\[N(h) = 1 + \underbrace{N(h-1)}_{\text{left sub-tree}} + \underbrace{N(h-2)}_{\text{right sub-tree}}\]](/wp-content/ql-cache/quicklatex.com-1f81e863b0e53b53d288a12ba32f6a41_l3.svg "Rendered by QuickLaTeX.com")
From our assumption, we have that  , so:
, so:
![\[N(h) > 1 + 2N(h-2) > 2N(h-2) > 4N(h-4) > 8N(h-6) > \ldots > 2^{\frac{h}{2}} N(0)\]](/wp-content/ql-cache/quicklatex.com-da92822a124717ef071672b368dde504_l3.svg "Rendered by QuickLaTeX.com")
An AVL structure with height  has only one node, so
has only one node, so  , and:
, and:
![\[\begin{aligned} n &= N(h) > 2^{\frac{h}{2}} \\ \log_2 n &> \frac{h}{2} \\ h &< 2 \log_2 n \in O(\log n) \end{aligned}\]](/wp-content/ql-cache/quicklatex.com-d54b51169700582a3c8181cd1096ec6c_l3.svg "Rendered by QuickLaTeX.com")
Therefore, in the worst-balanced case, an AVL tree’s height is . Hence, the operations such as search, insertion, and deletion have logarithmic time complexity.
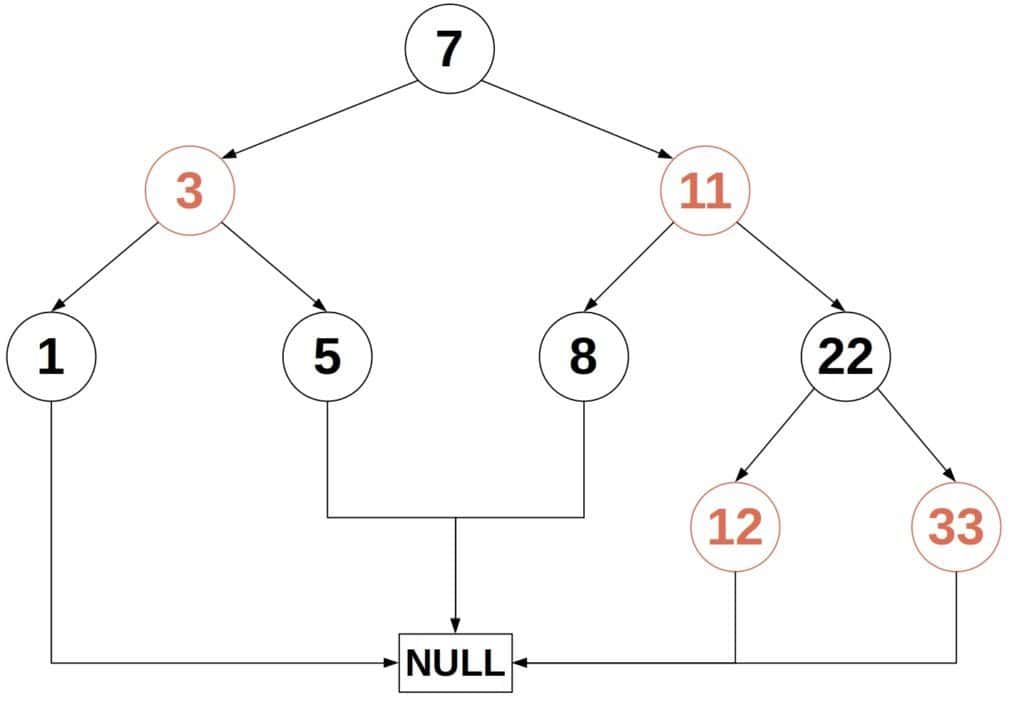
The Red-Black Trees (RBTs) also balance the sibling subtrees’ heights. But, an RBT differentiates between two types of nodes: the red ones and the black ones. An RBT ensures that all the paths from a node to its descendant leaves to pass through the same number of black nodes. Also, the number of black nodes from a node to its leaves, excluding the node, is called the node’s black height. The black height of the whole RBT is the black height of its root. For example (with NULL leaves coalesced into a single node to save space):
By definition, an RBT fulfills these conditions:
, the paths from , not including it, to its descendant leaves contain the same number of black nodes.Some authors don’t require the root to be black because we can repaint a tree in any case.
The properties of an RBT ensure:
.Let  be the black height of . We’ll first prove, by induction, that a sub-tree rooted at has at least
be the black height of . We’ll first prove, by induction, that a sub-tree rooted at has at least  internal nodes.
internal nodes.
The base case is  , which means that is an empty node, that is, a leaf:
, which means that is an empty node, that is, a leaf:
![\[2^{bh(NULL) } - 1 = 2^0 - 1 = 0\]](/wp-content/ql-cache/quicklatex.com-9622cfb0baff32ad23adc9452c2b5fe5_l3.svg "Rendered by QuickLaTeX.com")
So, we’ve covered the base case. In the inductive step, we focus on and its children. Their black heights are equal to or  , depending on their colors. By the hypothesis, they contain at least
, depending on their colors. By the hypothesis, they contain at least  nodes each. So, the whole tree rooted at contains this many nodes at a minimum:
nodes each. So, the whole tree rooted at contains this many nodes at a minimum:
![\[2 \cdot \left(2^{bh(x) - 1} - 1\right) + 1 &= 2^{bh(x)-1+1} -2 + 1 = 2^{bh(x)} - 1\]](/wp-content/ql-cache/quicklatex.com-865729aaa8d41d6f8da658226804f978_l3.svg "Rendered by QuickLaTeX.com")
Now, let be the height of the root node . Since red nodes can have only black children, at least half of the nodes from the root to any leaf must be black. Therefore, the root’s black height is  .
.
Using the result about the internal nodes, we get:
![\[\begin{aligned} n &\geq 2^{\frac{h}{2}} - 1 \\ n + 1 &\geq 2^{\frac{h}{2}} \\ 2^{\frac{h}{2}} &\leq n + 1 \\ h &\leq 2\log_2{n+1} \in O(\log n) \end{aligned}\]](/wp-content/ql-cache/quicklatex.com-bd7960f9056e4b3efac0bc1e39fea6c3_l3.svg "Rendered by QuickLaTeX.com")
Again, we get that the height grows as the logarithm of the number of nodes.
The weight-balanced trees (WBTs) don’t balance the heights of the sibling sub-trees, but the numbers of leaves in them. So, let  and
and  be the sub-trees of and let
be the sub-trees of and let  . We say that is balanced if:
. We say that is balanced if:
![\[\frac{leaves(x'')}{leaves(x')} \leq \beta \in (0, 1)\]](/wp-content/ql-cache/quicklatex.com-9a2bc944ea546f60ce5b7325daf15ccb_l3.svg "Rendered by QuickLaTeX.com")
We also require all the descendants of to fulfill the same condition. This is equivalent to stating that there exists an  such that the following holds for every node in the tree:
such that the following holds for every node in the tree:
To see why, let’s remember that  and follow the derivation:
and follow the derivation:
![\[\begin{aligned} leaves(x) &= leaves(x') + leaves(x'') \\ &\leq 2\beta \cdot leaves(x'') \\ &\implies \\ leaves(x'') &\geq \frac{1}{2\beta} \cdot leaves(x) \end{aligned}\]](/wp-content/ql-cache/quicklatex.com-8b6af5a8b122d086a9e03454cfc77625_l3.svg "Rendered by QuickLaTeX.com")
So, this is the recursive definition of a WBT :
(2)
Here’s an example of a WBT with  (the number of leaves is written inside each node):
(the number of leaves is written inside each node):
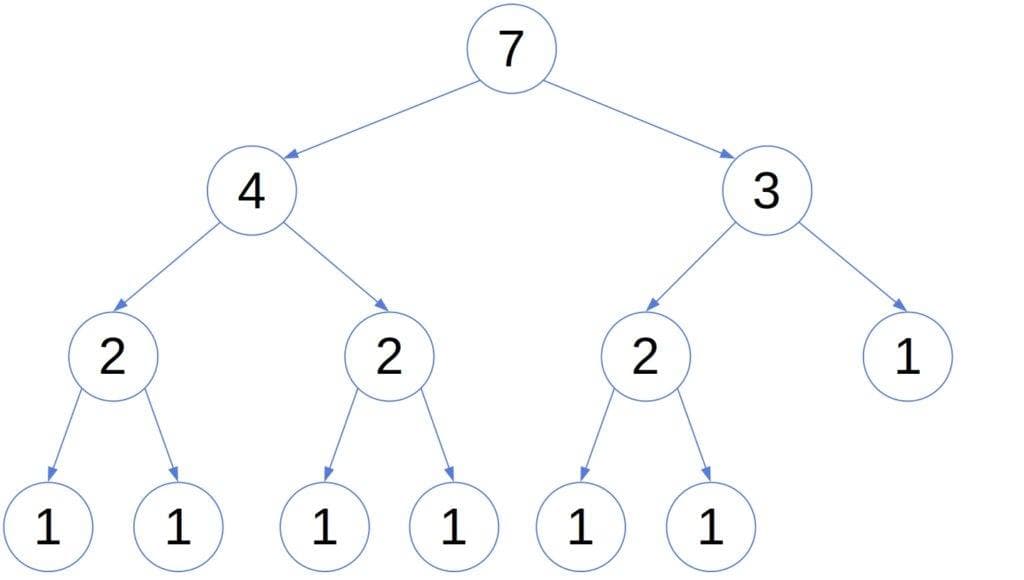
The number of leaves in the tree is its weight, hence the name. We’ll prove that the height of a WBT is also bounded by  .
.
Let’s suppose that is a minimal WBT whose height is , and let  denote the number of leaves in it. From the definition of a WBT, we see that a sub-tree of contains at most
denote the number of leaves in it. From the definition of a WBT, we see that a sub-tree of contains at most  of the node’s leaves. Also, a subtree’s height is at most
of the node’s leaves. Also, a subtree’s height is at most  . So, we have:
. So, we have:
![\[\begin{aligned} L(h-1) &\leq (1-\alpha) L(h) \\ L(h-2) & \leq (1-\alpha)^2 L(h) \\ &\ldots \\ L(0) &= 1 \leq (1-\alpha)^h L(h) \end{aligned}\]](/wp-content/ql-cache/quicklatex.com-f5d75107781a1c18f63410d8423c06c4_l3.svg "Rendered by QuickLaTeX.com")
Since  , where is the number of nodes in the tree, we have:
, where is the number of nodes in the tree, we have:
So, the height of a WBT is also logarithmic in the number of nodes.

If we use a too large  , re-balancing may become impossible. Its value should be
, re-balancing may become impossible. Its value should be  .
.
If we’re ready to use a complicated custom re-balancing algorithm, we can use an arbitrarily small . However, the recommendation is to use  .
.
In this article, we presented three types of balanced trees. Those were: the AVL trees, red-black trees, and weight-balanced trees. Using different notions of balance, they all guarantee the time complexity of search, insertion, and deletion.
However, the trees have to re-balance themselves upon change so that their height stays logarithmic in the number of nodes. The additional work complicates and slows down the algorithms for insertion and deletion. But, the overhead pays off because the complexity of the operations remains .

![\[\begin{aligned} leaves(x.left) &\geq \alpha \cdot leaves(x) \\ leaves(x.right) &\geq \alpha \cdot leaves(x) \end{aligned}\]](/wp-content/ql-cache/quicklatex.com-6a3d064efc5ea5803f71c88b09113fcf_l3.svg "Rendered by QuickLaTeX.com")

![\[\begin{aligned} (1 - \alpha)^h n &\geq 1 \\ n &\geq (1 - \alpha)^{-h} \\ (1-\alpha)^{-h} &\leq n \\ \left( \frac{1}{1-\alpha} \right)^{h} &\leq n \\ h &\leq \log_{\frac{1}{1-\alpha}}n \in O(\log n) \\ \end{aligned}\]](/wp-content/ql-cache/quicklatex.com-383438569f012d2c80dd495e3e60ea76_l3.svg "Rendered by QuickLaTeX.com")