

Yes, we're now running our only Summer Sale. All Courses are 30% off until 20th July, 2026:
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
1. Introduction
In computer networking, spanning tree protocols are essential for creating loop-free and redundant network topologies.
In the same context, rapid spanning tree protocol (RSTP) and spanning tree protocol (STP) are two commonly used protocols in Ethernet networks for achieving loop prevention and network redundancy. Although both the RSTP and STP protocols serve similar purposes, they differ in various aspects.
In this tutorial, we’ll explore the key differences between RSTP and STP, including their operation, features, and benefits.
2. Overview of RSTP and STP
In this section, we’ll delve into the distinctions between RSTP and STP across different aspects, including convergence time, port states, handling of topology changes, port roles, bridge ID calculation, port role transitions, backward compatibility, scalability, and more.
2.1. Convergence Time
Convergence time is when a protocol converges or stabilizes the network after a change in the network topology.
Specifically, the STP protocol uses a slow convergence algorithm that can take up to 30 seconds or even longer to converge. On the other hand, the RSTP protocol employs a rapid convergence algorithm that can converge in less than one second, making it much faster than STP.
This allows RSTP to quickly adapt to changes in the network, such as link failures or additions, and minimize network downtime.
2.2. Port States
Another difference between RSTP and STP is the number of port states and their operations.
STP has five port states: blocking, listening, learning, forwarding, and disabled. We can use these states to prevent loops by blocking certain ports and transitioning them to the forwarding state after a certain period.
In contrast, RSTP has only three port states: discarding, learning, and forwarding. Moreover, RSTP eliminates the listening and blocking states, allowing faster convergence and reduced network convergence time.
2.3. Topology Changes
Topology changes occur when a link fails or is restored in the network. RSTP and STP differ in how they handle topology changes.
STP uses a slow process called the listening and learning process, where ports first transition to the listening state and then to the learning state before finally transitioning to the forwarding state. This can take up to 50 seconds or more to converge, resulting in network downtime.
On the other hand, RSTP uses a faster process called the proposal and agreement process, where a root bridge sends a proposal message to its neighbors to determine if the topology has changed. If a neighbor agrees, the topology change is quickly propagated, resulting in faster convergence and minimal network downtime.
2.4. Port Roles
In STP, ports can be either designated or non-designated ports. Designated ports are selected on each network segment, and only one designated port is allowed per segment. In contrast, non-designated ports are blocked to prevent network loops.
In RSTP, ports can be either edge ports or non-edge ports. Edge ports connect to end devices, such as workstations or servers, and are automatically placed in the forwarding state, allowing for faster convergence. Non-edge ports, also known as network ports, are equivalent to designated ports in STP and are used for interconnecting switches. However, RSTP allows multiple edge ports per segment. It provides greater flexibility and scalability.
2.5. Bridge ID Calculation
The calculation of the bridge ID used to determine the root bridge in RSTP and STP also differs.
In STP, the bridge ID is based on the priority value and the MAC address of the switch. Moreover, the switch with the lowest bridge ID becomes the root bridge.
Conversely, in RSTP, the bridge ID is calculated differently. It uses a system ID extension (SID), which is a combination of the priority value, the VLAN ID, and the MAC address of the switch. This allows RSTP to have separate spanning trees for different VLANs, providing better scalability and network optimization.
2.6. Port Roles Transitions
In STP, transitioning from a blocking or listening state to a forwarding state can take up to 50 seconds or more as it goes through the listening and learning states. This can result in longer network downtime during convergence.
Conversely, transitioning from a discarding state to a forwarding state is much faster in RSTP, typically taking less than one second. This rapid transition allows quicker convergence and reduced network downtime, making RSTP more suitable for networks with strict uptime requirements.
2.7. Backward Compatibility
RSTP is backward compatible with STP, which means that RSTP switches can interoperate with STP switches in the same network.
Additionally, RSTP switches can detect the presence of STP switches and automatically fall back to STP operation for those switches.
This allows for a smooth network migration from STP to RSTP without disrupting the existing STP switches.
2.8. Scalability
In STP, large and complex networks with multiple VLANs can experience inefficient use of network resources due to the restriction of only allowing one spanning tree per VLAN.
In contrast, RSTP allows for multiple spanning trees per VLAN, which allows for better utilization of network resources and optimized network performance. RSTP also supports the concept of a per-VLAN spanning tree (PVST), where each VLAN can have its spanning tree, allowing for greater network design and optimization flexibility. Overall, RSTP offers improved scalability compared to STP.
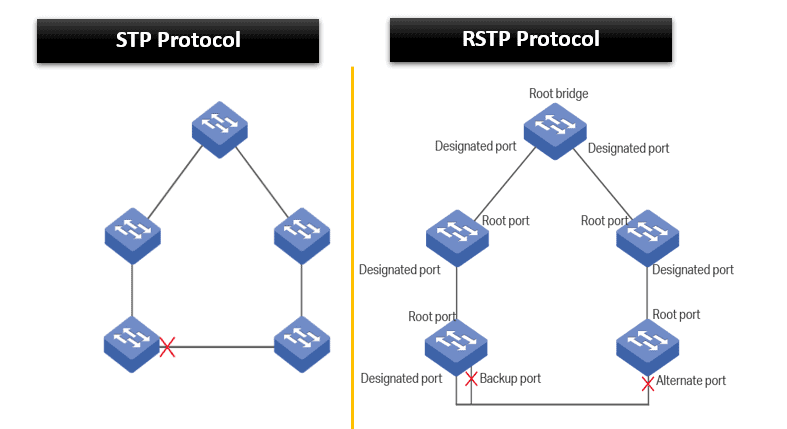
The following figure visualizes the STP and RSTP protocols:
4.9. Summary of Differences
The following table summarizes these main differences:
| Aspect | RSTP | STP |
|---|---|---|
| Convergence Time | Rapid convergence algorithm, less than 1 second | Slow convergence algorithm, up to 30 seconds or more |
| Port States | Discarding, learning, forwarding | Blocking, listening, learning, forwarding, disabled |
| Topology Changes | Proposal and agreement process | Listening and learning process |
| Port Roles | Edge ports and non-edge ports | Designated and non-designated ports |
| Bridge ID Calculation | Uses System ID Extension (SID) for VLAN support | Based on priority value and MAC address |
| Port Role Transitions | Faster transition from discarding to forwarding state | Slower transition through listening and learning states |
| Backward Compatibility | Backward compatible with STP, can interoperate with STP switches | Can fall back to STP operation for interoperability |
| Scalability | Supports multiple spanning trees per VLAN, per-VLAN spanning tree (PVST) | Supports only one spanning tree per-VLAN |
5. Conclusion
In conclusion, spanning tree protocols are crucial for reliable and redundant Ethernet network topologies.
Both protocols can work together seamlessly, allowing for smooth migration and interoperability. Furthermore, it’s important to understand their differences for effective network design and management.