

Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Last updated: March 18, 2024
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Prim’s algorithm and Dijkstra’s algorithm are both famous standard graph algorithms. In this quick tutorial, we’ll discuss the difference between Prim’s and Dijkstra’s algorithms.
Before we proceed, let’s take a look at the two key definitions: minimum spanning tree and shortest path.
Given an undirected weighted graph, a minimum spanning tree (MST) is a subgraph that connects all the vertices with the lowest possible sum of its edge weights.
Let’s depict it with an example:
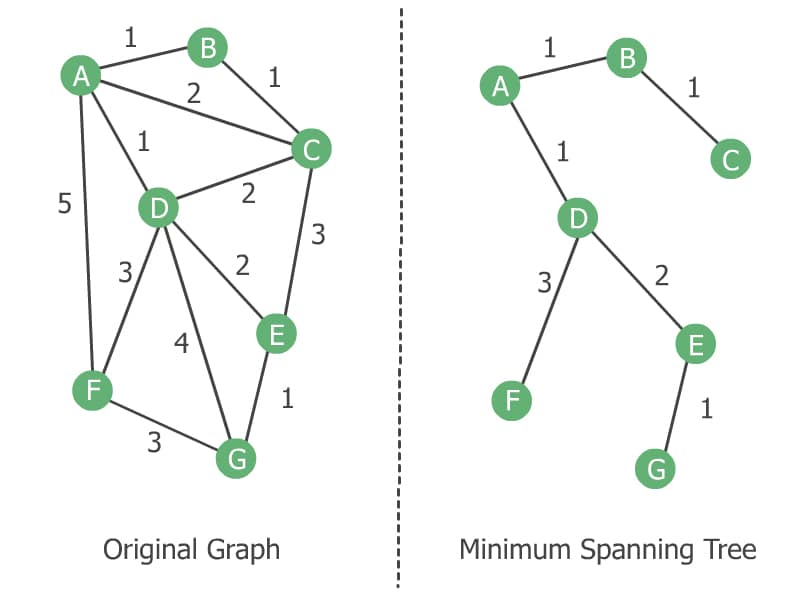
On the right side, we have the MST of the graph on the left. Note that an MST always contains all vertices of the original graph.
Given a weighted graph, the shortest path (or geodesic path) between two vertices is a path with the lowest possible sum of edge weights.
Let’s find the shortest path from A to G in our graph:
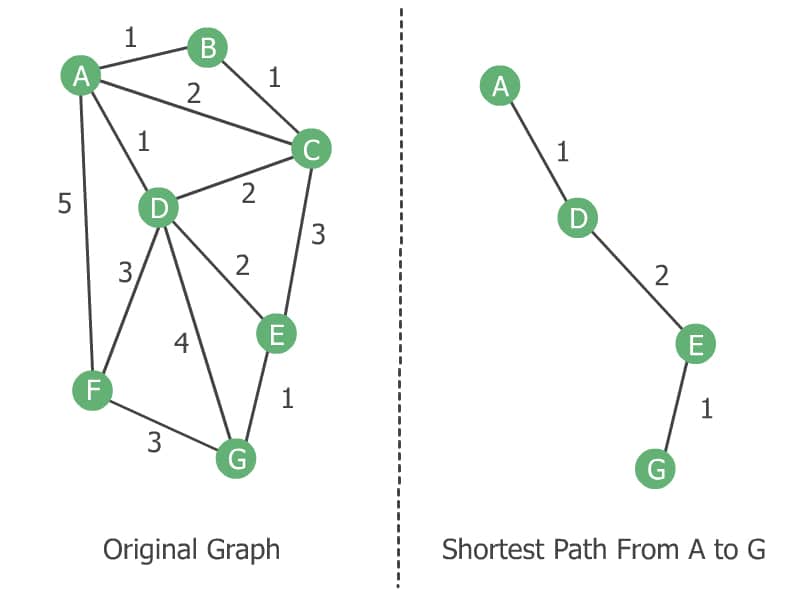
As you can see in the above image, a shortest-path tree may not contain all vertices of the original graph.
In the computation aspect, Prim’s and Dijkstra’s algorithms have three main differences:
In practice, Dijkstra’s algorithm is used when we want to save time and fuel traveling from one point to another. Prim’s algorithm, on the other hand, is used when we want to minimize material costs in constructing roads that connect multiple points to each other.
In this tutorial, we discussed the difference between Prim’s and Dijkstra’s algorithms. Detailed explanations and implementations are available in our articles about Prim’s and Dijkstra’s, respectively.