

Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Last updated: March 18, 2024
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
There are several approaches to determine whether a list of polygon points is ordered clockwise or counterclockwise.
In this tutorial, we’ll create a simple algorithm to determine the polygon points’ orientation. Furthermore, we’ll revise and use some formulas for the area computation. We assume having a basic knowledge of polygons, and we’ll also use basic definitions of linear algebra.
Let’s recall the way the polygon is stored in memory. Assume  is our polygon. It consists of
is our polygon. It consists of  points. Therefore, we can represent
points. Therefore, we can represent  as
as  , where
, where  . So the shape of is represented as the list of points.
. So the shape of is represented as the list of points.
We’ll also define another polygon  . It’s important to note it consists of the same points in a reversed order. and
. It’s important to note it consists of the same points in a reversed order. and  are two different polygons, which look absolutely the same and have equal shapes and areas.
are two different polygons, which look absolutely the same and have equal shapes and areas.
What differs between them is their point orientation. If the points in are oriented clockwise, then point orientation in is counterclockwise and vice versa:
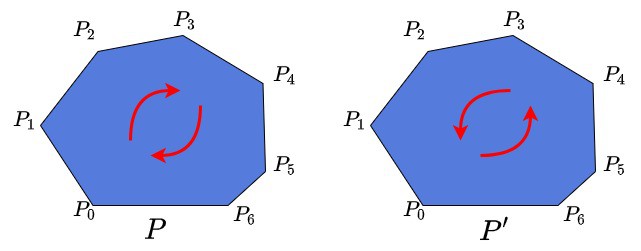
We’ll use this information about point orientation further in the tutorial. Moreover, as previously mentioned, the areas of and  are numerically equal, but the signs of the areas are different.
are numerically equal, but the signs of the areas are different.
There is a simple linear-time algorithm for the 2D polygon area computation. The algorithm introduces a formula for the area. We’ll briefly discuss the key aspects of the polygon area calculation, as well as use this formula in our point orientation algorithm.
The area of a shape can either be positive or negative. If the shape is represented as a list of points, then it depends on the orientation of the points. Let’s briefly remember the formulas for calculating the areas of triangles and polygons.
Now let’s suppose a triangle  is defined by 3 points
is defined by 3 points  ,
,  , and
, and  :
:
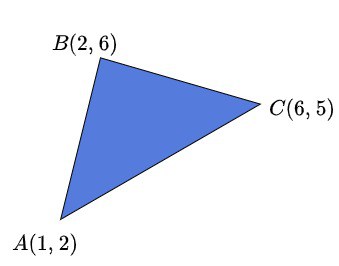
The area of this triangle can be computed with a simple formula from linear algebra: 
 .
.
If we shift our triangle to make point  be
be  , the area of the triangle won’t change:
, the area of the triangle won’t change:
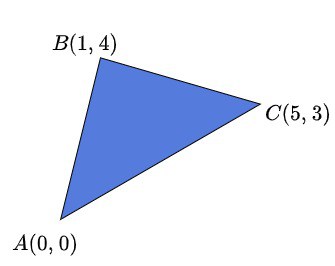
However, the formula of area computation will be a bit simplified:


 .
.
Now we can calculate the area of a polygon using the formula for the triangle area. The idea of the approach is simple. It uses the decomposition technique. We can decompose the polygon of points to triangles. To do this, we choose the arbitrary point  , usually
, usually  .
.
After that, we can compute the areas of triangles. Assume we have a polygon represented with the set of points  . We form a triangle by picking points ,
. We form a triangle by picking points ,  , and
, and  with
with  ,
,  . Then we sum up all the areas to get the area of the entire polygon.
. Then we sum up all the areas to get the area of the entire polygon.
The final formula that computes the area of the polygon:
 , where
, where  with .
with .
It’s important to remember that the area of the polygon can be either positive or negative. It depends on the chosen point for decomposition and order of the vertices.
Let’s define a simple Signum function  . It takes an arbitrary number
. It takes an arbitrary number  as a parameter and returns only three values. If
as a parameter and returns only three values. If  ,
,  . If
. If  ,
,  . Finally, if
. Finally, if  ,
,  . We may notice this function gives us information about the sign of the number.
. We may notice this function gives us information about the sign of the number.
Now let’s introduce an algorithm for getting the points orientation of polygon  . First, we compute the signed area by the above formula to get the number
. First, we compute the signed area by the above formula to get the number  . Second, we compute
. Second, we compute  . Finally, we compare
. Finally, we compare  with zero. If
with zero. If  , then the points are oriented counterclockwise.
, then the points are oriented counterclockwise.
Similarly, if  , then the points have a clockwise orientation. We wouldn’t expect the case when
, then the points have a clockwise orientation. We wouldn’t expect the case when  . That would mean the area of the polygon is 0. In that case, it’s probable that the polygon was not correctly defined.
. That would mean the area of the polygon is 0. In that case, it’s probable that the polygon was not correctly defined.
The time complexity of the above algorithm is  , where is the number of points of the polygon. It takes linear time to compute the area. After that, it takes
, where is the number of points of the polygon. It takes linear time to compute the area. After that, it takes  time to learn whether the area is positive or not. Thus, the final complexity is
time to learn whether the area is positive or not. Thus, the final complexity is  .
.
The space complexity is  because we only need one variable to store the area.
because we only need one variable to store the area.
In this article, we’ve introduced an algorithm, which helps to determine polygon point orientation in linear time. Furthermore, we’ve recalled a simple approach to compute the area of a polygon. There exist several other techniques for determining point orientation; however, all of them are based on this simple idea.