

Yes, we're now running our only Summer Sale. All Courses are 30% off until 20th July, 2026:
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
1. Overview
In graph theory, a bipartite graph is a special kind of graph that consists of two vertex sets. In this tutorial, we’ll discuss a general definition. We’ll also present an algorithm to determine whether a given graph is bipartite or not.
2. Bipartite Graph Definition
Let’s consider a graph  . The graph
. The graph  is a bipartite graph if:
is a bipartite graph if:
- The vertex set
 of can be partitioned into two disjoint and independent sets
of can be partitioned into two disjoint and independent sets  and
and 
- All the edges from the edge set
 have one endpoint vertex from the set and another endpoint vertex from the set
have one endpoint vertex from the set and another endpoint vertex from the set
Let’s try to simplify it further. Now in graph , we’ve two partitioned vertex sets and . Suppose we’ve an edge  . Now according to the definition of a bipartite graph, the edge
. Now according to the definition of a bipartite graph, the edge  should connect to one vertex from set and another from set .
should connect to one vertex from set and another from set .
3. An Example
It’s now time to see an example of a bipartite graph:
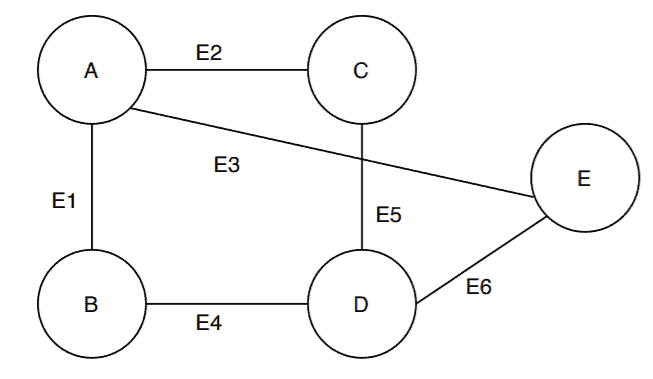
Here, we’ve taken a random graph  . Now, to satisfy the definition of a bipartite graph, the vertex set needs to be partitioned into two sets such that each edge joins the two vertex sets.
. Now, to satisfy the definition of a bipartite graph, the vertex set needs to be partitioned into two sets such that each edge joins the two vertex sets.
Is it possible to partition the vertex set of  so that it satisfies the bipartite graph definition? Let’s find out:
so that it satisfies the bipartite graph definition? Let’s find out:
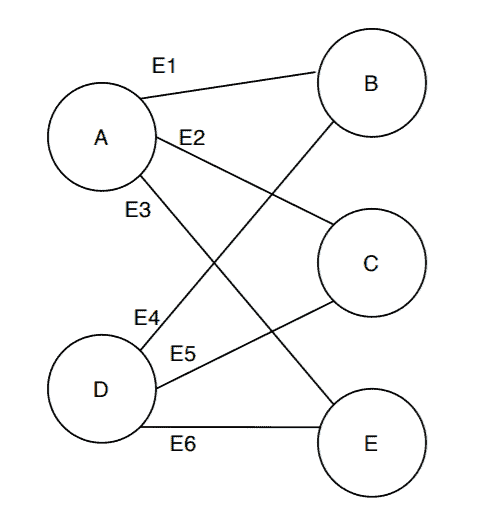
This is the same graph , just with a different representation. Here, we partition the vertex set  into two disjoint vertex sets
into two disjoint vertex sets  and
and  .
.
Also, we can see the edges from the edge set  follows the definition of a bipartite graph. Each edge has one endpoint in and another endpoint in . There are no edges whose both endpoints belong to or .
follows the definition of a bipartite graph. Each edge has one endpoint in and another endpoint in . There are no edges whose both endpoints belong to or .
Therefore, we can conclude that the graph is a bipartite graph.
4. Properties
Bipartite graphs have some very interesting properties. In this section, we’ll discuss some important properties of a bipartite graph.
If a graph is a bipartite graph then it’ll never contain odd cycles.
In graph , a random cycle would be  . Another one is
. Another one is  .
.
The length of the cycle is defined as the number of distinct vertices it contains. In both of the above cycles, the number of vertices is  . Hence these are even cycles.
. Hence these are even cycles.
The subgraphs of a bipartite graph are also bipartite.
In graph , let’s select a random subgraph  . Here
. Here  and
and  . This subgrah
. This subgrah  of is also a bipartite graph.
of is also a bipartite graph.
A bipartite graph is always 2-colorable, and vice-versa.
In graph coloring problems, 2-colorable denotes that we can color all the vertices of a graph using  different colors such that no two adjacent vertices have the same color.
different colors such that no two adjacent vertices have the same color.
In the case of the bipartite graph , we have two vertex sets and each edge has one endpoint in each of the vertex sets. Therefore, all the vertices can be colored using different colors and no two adjacent nodes will have the same color.
In an undirected bipartite graph, the degree of each vertex partition set is always equal.
In the example graph , the partitions are: and . Now the sum of degrees of vertices  and
and  will be the degree of the set . and both are of degree
will be the degree of the set . and both are of degree  . Hence, the degree of is
. Hence, the degree of is  .
.
The degree of is the sum of degrees of vertices  ,
,  , and . The vertices , , and are of degree each. Hence, the degree of the set is . So as is a bipartite graph, the degree of the two vertex partition sets are of equal degree.
, and . The vertices , , and are of degree each. Hence, the degree of the set is . So as is a bipartite graph, the degree of the two vertex partition sets are of equal degree.
5. Algorithm
In this section, we’ll present an algorithm that will determine whether a given graph is a bipartite graph or not.
algorithm IsBipartite(G(V, E), S):
// INPUT
// G(V, E) = a graph with vertices V and edges E
// S = starting vertex
// OUTPUT
// Flag indicating if if the graph is bipartite
r <- create an empty queue
color[S] <- RED
r.enqueue(S)
while r is not empty:
n1 <- r.dequeue()
for each n2 in n1.Adj():
if color[n2] = null:
if color[n1] = RED:
color[n2] = BLUE
else:
color[n2] = RED
r.enqueue(n2)
else:
if color[n2] = color[n1]:
return 'Graph is not Bipartite'
return 'Graph is Bipartite'This algorithm uses the concept of graph coloring and BFS to determine a given graph is bipartite or not.
This algorithm takes the graph and a starting vertex  as input. The algorithm returns either the input graph is bipartite or the graph is not a bipartite graph.
as input. The algorithm returns either the input graph is bipartite or the graph is not a bipartite graph.
The steps of this algorithm are:
- Assign a red color to the starting vertex
- Find the neighbors of the starting vertex and assign a blue color
- Find the neighbor’s neighbor and assign a red color
- Continue this process until all the vertices in the graph are assigned a color
- During this process, if a neighbor vertex and the current vertex have the same color then the algorithm terminates. The algorithm returns that the graph is not a bipartite graph
We’ve used a queue data structure  to store and manage all the neighbor vertices.
to store and manage all the neighbor vertices.
6. Running the Algorithm on a Graph
In this section, we’ll run the algorithm on a sample graph to verify that the algorithm gives the correct output:
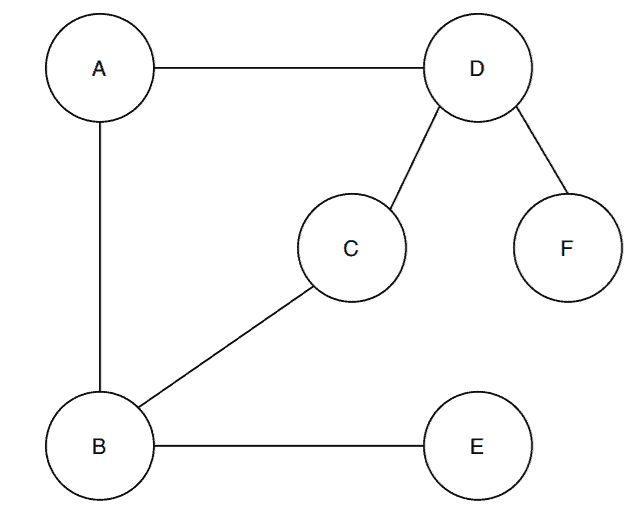
We’ve taken a sample graph  and vertex set
and vertex set  has vertices. Here we’re picking the vertex as the starting vertex. So let’s start the first step:
has vertices. Here we’re picking the vertex as the starting vertex. So let’s start the first step:
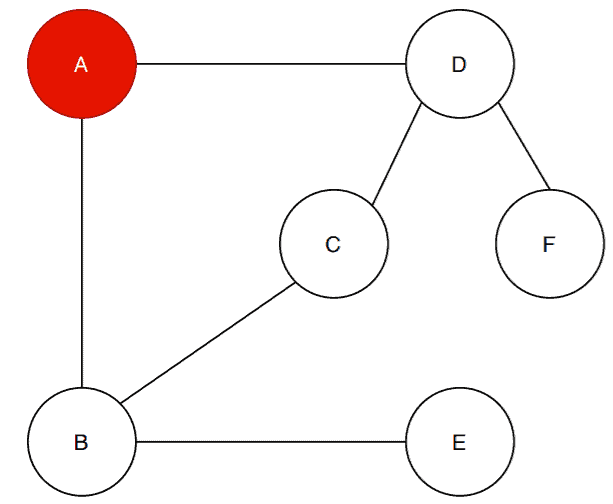
So the first step of the algorithm is to fill the starting vertex with the red color. The next step is to find the neighbor vertices of the vertex and fill them with the color blue:
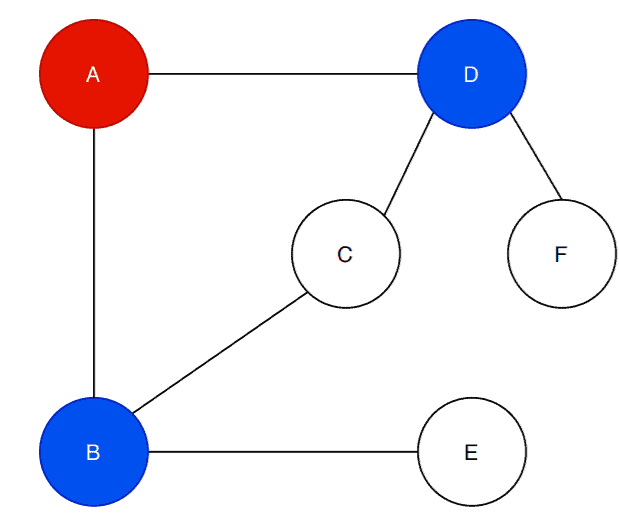
The vertex has two adjacent vertices: and . The algorithm first checks if the adjacent vertices are already filled with color. In our case, they are not filled. The algorithms fill the vertex and with the blue color.
We then choose any of the newly filled vertices and find the neighbors. Let’s choose the vertex :
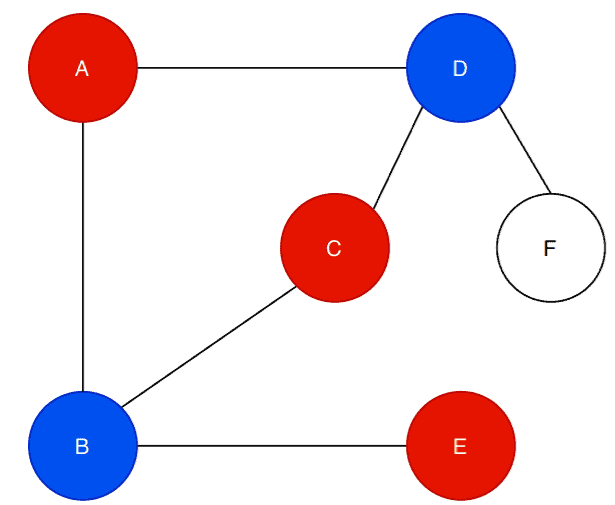
In graph , the vertex is adjacent to vertex and . Now the algorithm first checks if the vertices are already filled with some color. In our case, the vertices are not filled with color.
Next, the algorithm checks the color of the vertex . As the color of is blue, so the algorithm fills and with red:
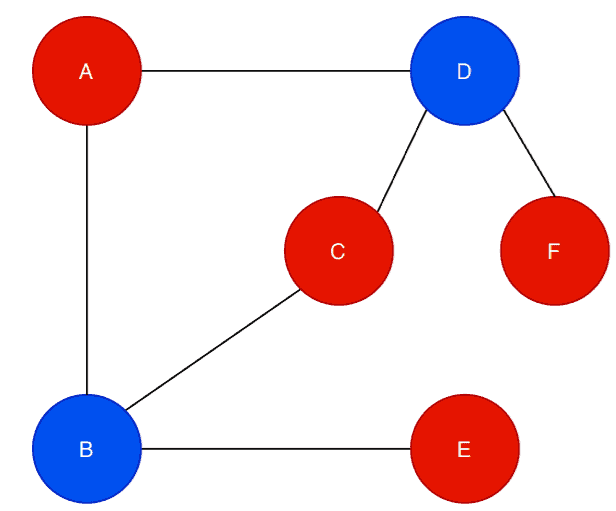
Now, the algorithm checks the adjacent vertices for the . The vertex has two adjacent vertices: and  . Again, the algorithm checks whether the vertices already filled with color or not. In this case, the vertex is already filled with color. But the vertex is not filled yet.
. Again, the algorithm checks whether the vertices already filled with color or not. In this case, the vertex is already filled with color. But the vertex is not filled yet.
The algorithm checks the color of the vertex . As the vertex is filled with the blue color, the algorithm fills the vertex with the red color. The algorithm continues this process until it checks all the vertices and it’s neighbors once.
Now, we can see that in the graph , no adjacent vertices have the same color. Also, we can see two clear partitions of the vertex set:  and
and  .
.
Therefore, the algorithm returns that the graph is a bipartite graph.
7. Time Complexity Analysis
In the algorithm, first, we traverse each vertex once. Then for each vertex, we visit each neighbor of a vertex once. The algorithm uses BFS for traversing. BFS takes  time.
time.
For storing the vertices, we can either use an adjacency matrix or an adjacency list.
Now if we use an adjacency matrix, then it takes  to traverse the vertices in the graph. So, if we use an adjacency matrix, the overall time complexity of the algorithm would be .
to traverse the vertices in the graph. So, if we use an adjacency matrix, the overall time complexity of the algorithm would be .
On the other hand, an adjacency list takes time to traverse all the vertices and their neighbors in the graph. Therefore, if we use an adjacency list in the algorithm then the overall time complexity will be .
8. Conclusion
In this tutorial, we’ve discussed the bipartite graph in detail.
We’ve presented a graph coloring based BFS algorithm to determine if a graph is bipartite or not.
Finally, we’ve analyzed the time complexity of the given algorithm.