

Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Last updated: May 4, 2024
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Gradient orientation and gradient magnitude are fundamental concepts in the field of computer vision and image processing. Moreover, these concepts are used to extract information from digital images and enable a range of applications such as object recognition, image segmentation, and edge detection.
In this tutorial, we’ll discuss the basics of gradient orientation and gradient magnitude.
First, let’s discuss the definition of the gradient orientation. Gradient orientation refers to the direction of an image’s maximum change in intensity.
In particular, there’re several ways to perform calculations. However, one common approach is to use the central difference method. Furthermore, this involves calculating the partial derivatives of an image with respect to the  and
and  directions.
directions.
Additionally, the partial derivative in the direction represents the rate of change in the horizontal direction. In contrast, the partial derivative in the direction represents the rate of change in the vertical direction.
Therefore, the gradient orientation is computed using the following equation:
![\[\theta = Arctan(\frac{G_y}{G_x})\]](/wp-content/ql-cache/quicklatex.com-e6605ffd8ec74e851510ca3f15caaab8_l3.svg "Rendered by QuickLaTeX.com")
where  and
and  are the partial derivatives in the and directions, respectively, and
are the partial derivatives in the and directions, respectively, and  is the gradient orientation. Moreover, the gradient orientation is typically measured in radians.
is the gradient orientation. Moreover, the gradient orientation is typically measured in radians.
Additionally, the gradient orientation is invariant to the rotation of the image. Hence, the same object in an image will have the same gradient orientation regardless of its orientation.
Now, let’s discuss the definition of the gradient magnitude. Gradient magnitude refers to the strength of an image’s intensity change.
Typically, there’re multiple calculation methods. However, based on the simple central difference method, it’s computed by taking the square root of the sum of the squares of the partial derivatives in the and directions.
Therefore, the gradient magnitude is computed using the following equation:
![\[|G|=\sqrt{{G_x^2+G_y^2}}\]](/wp-content/ql-cache/quicklatex.com-a4d525e4ad46f97ecb12a66cae0addef_l3.svg "Rendered by QuickLaTeX.com")
where and are the partial derivatives in the and directions, respectively, and  is the gradient magnitude.
is the gradient magnitude.
Additionally, the gradient magnitude can be visualized as a grayscale image, where the intensity of each pixel represents the strength of the gradient at that location.
Moreover, high gradient magnitude values usually indicate edges in an image. However, in areas with high noise levels, the gradient magnitude can also be high, even if there is no meaningful change in intensity.
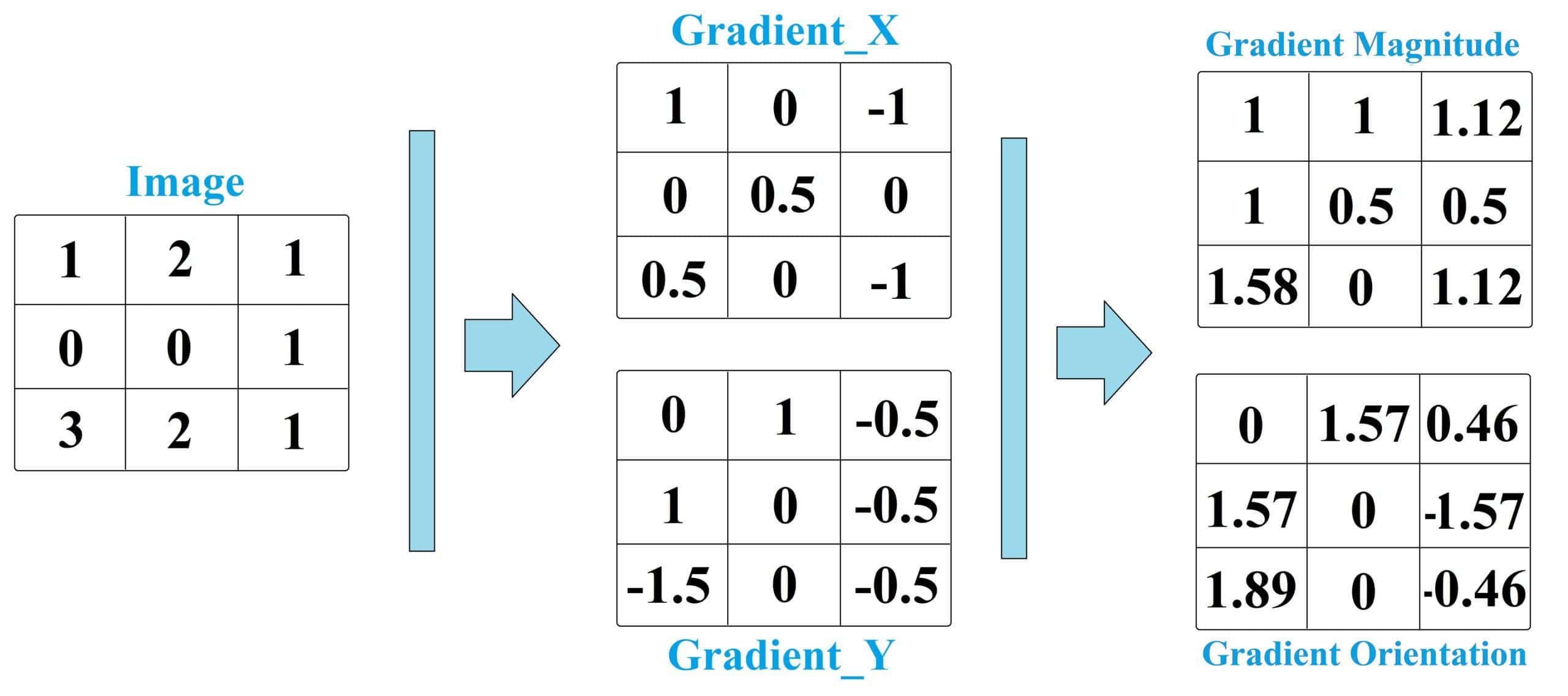
Let’s say we have a grayscale image with pixel values represented by the following matrix:
![\[Image =\left[\begin{array}{ccc} 1 & 2 & 1 \\ 0 & 0 & 1 \\ 3 & 2 & 1 \end{array}\right]\]](/wp-content/ql-cache/quicklatex.com-72ee9fb79fd6eb0b901297394710e72c_l3.svg "Rendered by QuickLaTeX.com")
Hence, we can calculate the gradient in the -direction using the central difference method as follows:
![\[\operatorname{gradient}_x (i, j)=\frac{(f(i, j+1)-f(i, j-1))}{2}\]](/wp-content/ql-cache/quicklatex.com-92576ce68e29b4240bb3ffd611f10efd_l3.svg "Rendered by QuickLaTeX.com")
Moreover, note that if  refers to an element beyond the matrix, its value would be zero. For instance, in the above example,
refers to an element beyond the matrix, its value would be zero. For instance, in the above example,  or
or  have zero values since
have zero values since  =1, 2, and 3 are the only existing columns of the matrix.
=1, 2, and 3 are the only existing columns of the matrix.
Finally, we have:
![\[gradient_x =\left[\begin{array}{ccc} \frac{2-0}{2} & \frac{1-1}{2} & \frac{0-2}{2}\\ \\ \frac{0-0}{2} & \frac{1-0}{2} & \frac{0-0}{2}\\ \\ \frac{2-0}{2} & \frac{1-3}{2} & \frac{0-2}{2} \end{array}\right] =\left[\begin{array}{ccc} 1 & 0 & -1 \\ 0 & 0.5 & 0 \\ 1 & -1 & -1 \end{array}\right]\]](/wp-content/ql-cache/quicklatex.com-41df2309f2994b4ac2e6a261d3e80dff_l3.svg "Rendered by QuickLaTeX.com")
Similarly, we can calculate the gradient in the -direction as follows:
![\[\operatorname{gradient}_y (i, j)=\frac{(f(i+1, j)-f(i-1, j))}{2}\]](/wp-content/ql-cache/quicklatex.com-0b07025849d4cd19bfd667e1ba1baaa1_l3.svg "Rendered by QuickLaTeX.com")
Again, note that if refers to an element beyond the matrix, its value would be zero. For instance, in the above example,  or
or  have zero values since
have zero values since  =1, 2, and 3 are the only existing rows of the matrix.
=1, 2, and 3 are the only existing rows of the matrix.
Thus, we have:
![\[gradient_y = \left[\begin{array}{ccc} \frac{0-0}{2} & \frac{2-0}{2} & \frac{1-0}{2}\\ \\ \frac{3-1}{2} & \frac{2-2}{2} & \frac{1-1}{2}\\ \\ \frac{0-0}{2} & \frac{0-0}{2} & \frac{0-1}{2} \end{array}\right] =\left[\begin{array}{ccc} 0 & 1 & 0.5 \\ 1 & 0 & 0 \\ 0 & 0 & -0.5 \end{array}\right]\]](/wp-content/ql-cache/quicklatex.com-c5c764c31a891f5f736dc10b09396aef_l3.svg "Rendered by QuickLaTeX.com")
Finally, once we have the gradient in the directions for and , we can calculate the gradient magnitude and orientation using the formulas mentioned in the previous section.
![\[Gradient Magnitude =\left[\begin{array}{ccc} 1 & 1 & 1.118 \\ 1 & 0.5 & 0.5 \\ 1.581 & 0 & 1.118 \end{array}\right]\]](/wp-content/ql-cache/quicklatex.com-7f357e8844a6b7a21e47630f936ead51_l3.svg "Rendered by QuickLaTeX.com")
Additionally, note the values for gradient orientation are calculated based on radians. So, for example, 1.57 simply means 90 degrees.
![\[Gradient Orientation =\left[\begin{array}{ccc} 0 & 1.57 & 0.46 \\ 1.57 & 0 & -1.57 \\ 1.892 & 0 & -0.464 \end{array}\right]\]](/wp-content/ql-cache/quicklatex.com-36e2104c0e7be0b517547e547e64bb79_l3.svg "Rendered by QuickLaTeX.com")
Furthermore, if a pixel’s gradients in both and direction are zero, then the gradient orientation cannot be calculated using the mentioned formula. Thus, this is because dividing by zero is undefined, and the formula requires a non-zero denominator.
In such cases, the gradient orientation is usually set to 0 or 180 degrees, depending on the convention being used. Hence, we set 0 for the pixel at the location of (3,2):
In this article, we used the central difference method. However, several other methods can be used to calculate the gradient magnitude and orientation, depending on the specific application and the computational resources available. Therefore, the choice of method will depend on the specific application and the tradeoff between accuracy and computational resources.
Therefore, let’s discuss some additional methods in the following subsections.
The Sobel operator is a popular edge detection filter that calculates the gradient magnitude and orientation by convolving the image with a small kernel. Hence, this method is more accurate than the central difference but may be more computationally expensive.
The Prewitt operator is similar to the Sobel operator but uses a slightly different kernel. Like the Sobel operator, it’s more accurate than the central difference method but may be more computationally expensive.
The LoG method involves convolving the image with a Gaussian filter to smooth out noise and then taking the Laplacian of the resulting smoothed image. Therefore, this method is more complex than the previous methods but can be more accurate, especially for detecting small details in the image.
The Canny edge detection algorithm is a multi-stage process that involves smoothing the image, calculating the gradient magnitude and orientation using the Sobel operator, and applying non-maximum suppression to thin the edges. Finally, we apply hysteresis thresholding to identify strong edges. Hence, this method is considered one of the most accurate and robust edge detection techniques.
Gradient orientation and gradient magnitude are widely used in computer vision and image processing applications. Here are some of the applications:
In this article, we explained gradient orientation and magnitude and their applications. Understanding these concepts is crucial for developing accurate algorithms for analyzing digital images.