

Yes, we're now running our only Summer Sale. All Courses are 30% off until 20th July, 2026:
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
1. Introduction
How can we solve a system of linear equations? We can use methods such as Cramer’s rule or Gaussian elimination. While the latter is more efficient for larger systems, the former is often used when the determinant can be easily computed. Another advantage of Cramer’s rule is its educational aspect. When teaching or learning linear algebra, this concept helps to illustrate the importance of determinants in solving linear systems.
In this tutorial, we’ll review how Cramer’s rule works and how we can interpret its results geometrically.
2. Cramer’s Rule
Let’s consider a simple example of a system of linear equations in two dimensions, keeping in mind that the same idea extends to higher-dimensional problems:
![\[\begin{cases} ax + by = e \\ cx + dy = f \\ \end{cases}\]](/wp-content/ql-cache/quicklatex.com-589d4913a63a06b5114bfb934c50018e_l3.svg "Rendered by QuickLaTeX.com")
We start solving it by computing the determinant of the left side:
![\[D = \begin{vmatrix} a & b \\ c & d \end{vmatrix} = ad - bc\]](/wp-content/ql-cache/quicklatex.com-15a840640897dc2388cb1a34cd79d1b4_l3.svg "Rendered by QuickLaTeX.com")
Next, we replace the first column with the right-hand side:
![\[D_x = \begin{vmatrix} e & b \\ f & d \end{vmatrix} = ed - bf\]](/wp-content/ql-cache/quicklatex.com-8042c0c9f66efe14a632ed6f37daf5d1_l3.svg "Rendered by QuickLaTeX.com")
Then, we do the same with the second column:
![\[D_y = \begin{vmatrix} a & e \\ c & f \end{vmatrix} = af - ec\]](/wp-content/ql-cache/quicklatex.com-43ecf48903d27e55a39a73befd1a3ccf_l3.svg "Rendered by QuickLaTeX.com")
Finally, we obtain the values for  and
and  that solve the system as follows:
that solve the system as follows:
![\[x = \frac{D_x}{D} \textrm{ and } y = \frac{D_y}{D}\]](/wp-content/ql-cache/quicklatex.com-0b106720684ba1374fb980d11099ba9e_l3.svg "Rendered by QuickLaTeX.com")
2.1. Numerical Demonstration
To demonstrate, we’ll use the following linear system:
![\[\begin{cases} 3x + y = 5 \\ 2x + 3y = 8 \\ \end{cases}\]](/wp-content/ql-cache/quicklatex.com-8edfe86b004c0dbfdb53a26aebbc1320_l3.svg "Rendered by QuickLaTeX.com")
We can solve it using Cramer’s rule:
![\[x = \frac{D_x}{D} = \frac{7}{7} = 1 \textrm{ and } y = \frac{D_y}{D} = \frac{14}{7} = 2\]](/wp-content/ql-cache/quicklatex.com-742ec1ed022e88ffd9037561cc9e69f3_l3.svg "Rendered by QuickLaTeX.com")
Is there a way to obtain the same result using a geometric interpretation of this rule?
3. Geometric Interpretation
First, let’s review the intuition behind transformations and their geometric interpretation.
3.1. Geometric Transformations and Systems of Linear Equations
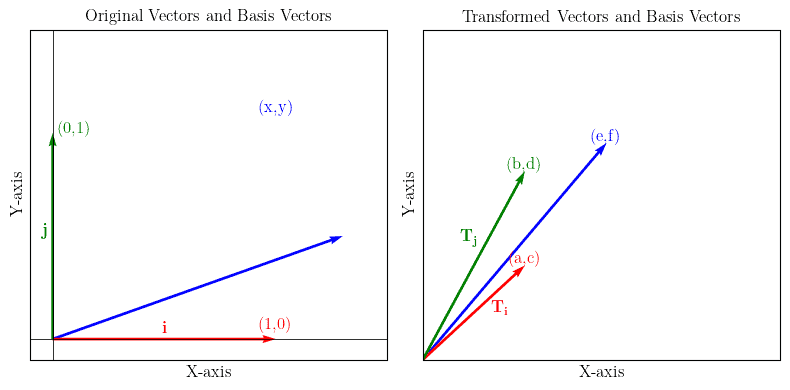
A geometric transformation maps points (vectors) from the input space to vectors in the output space. Here, we’ll consider the case where the two spaces are equal and two-dimensional.
Let our transformation  be:
be:
![\[T= \begin{bmatrix} a & b \\ c & d \end{bmatrix} \qquad a,b,c,d \in R\]](/wp-content/ql-cache/quicklatex.com-f57a3c48e95dfbad030e197fec8cd843_l3.svg "Rendered by QuickLaTeX.com")
We assume that maps each input point to only one output point and vice versa, that for each point in a plane, only one is mapped into it.
Applying to a vector ![[x, y]](/wp-content/ql-cache/quicklatex.com-15930e4c929b65a2e3095343efa1e783_l3.svg "Rendered by QuickLaTeX.com") , we get a new vector
, we get a new vector ![[e, f]](/wp-content/ql-cache/quicklatex.com-435ddae3c33fc82650b3b55d7bd729fd_l3.svg "Rendered by QuickLaTeX.com") . Algebraically, this mapping corresponds to the system of linear equations in Section 2:
. Algebraically, this mapping corresponds to the system of linear equations in Section 2:
![\[\begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} e \\ f \end{bmatrix}\]](/wp-content/ql-cache/quicklatex.com-2cb70bb23552772ef1acaefd468d6598_l3.svg "Rendered by QuickLaTeX.com")
So, we can interpret the system as the task of finding the unknown vector that transformation maps into a known vector .
3.2. Visualization of Geometric Transformations
Transformation can skew and translate vectors depending on the actual values of  :
:
We can see that the basis vectors have changed. So, the area they span has also changed:
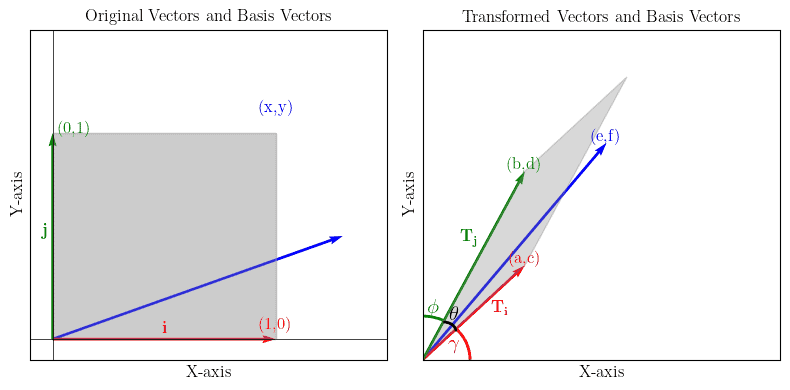
We had a unitary square that became a parallelogram stretched by a factor equal to the determinant of . Let’s verify that.
We know that the cross-product between two vectors gives the area between them. So, we can compute the new area as:
![\[NewArea = \lVert \mathbf{Ti} \rVert \lVert \mathbf{Tj} \rVert \left|\sin(\theta)\right|\]](/wp-content/ql-cache/quicklatex.com-3b7acc21bd44da5d0acf4af039bff62a_l3.svg "Rendered by QuickLaTeX.com")
Then, we can compute  with trigonometry:
with trigonometry:
![\[\theta = 90^{\circ} - \gamma - \phi\]](/wp-content/ql-cache/quicklatex.com-c91d973e1dfe0f2dd69f6dbd1a41888e_l3.svg "Rendered by QuickLaTeX.com")
where
![\[\gamma = tg^{-1}\left(\frac{c}{a}\right) \qquad \phi =tg^{-1}\left(\frac{b}{d}\right)\]](/wp-content/ql-cache/quicklatex.com-c2f74f0a365a958bca3f6f374e87aa24_l3.svg "Rendered by QuickLaTeX.com")
If we replace the magnitude of the transformed basis vectors, we finally obtain:
![\[NewArea = \sqrt{a^2 + c^2} \sqrt{b^2 + d^2} (\left|\sin(\theta)\right| )\]](/wp-content/ql-cache/quicklatex.com-ce5d29cc77a7fd25b248b6d60437d4da_l3.svg "Rendered by QuickLaTeX.com")
If we consider our previous example, we have  which gives us
which gives us  and:
and:
![\[NewArea = (\sqrt{3^2 + 2^2}) (\sqrt{1^2 + 3^2}) (\left|\sin(37.875^{\circ})\right| ) = 7\]](/wp-content/ql-cache/quicklatex.com-4468aeb7874eab80c8f08baa1a223c66_l3.svg "Rendered by QuickLaTeX.com")
This is precisely the determinant  we calculated before using Cramer’s rule. So, the unitary square gets scaled by a factor of
we calculated before using Cramer’s rule. So, the unitary square gets scaled by a factor of  .
.
3.3. Geometric Solving
Next, let’s draw a parallelogram formed by the unknown vector and the unitary basis vector  before transformation:
before transformation:
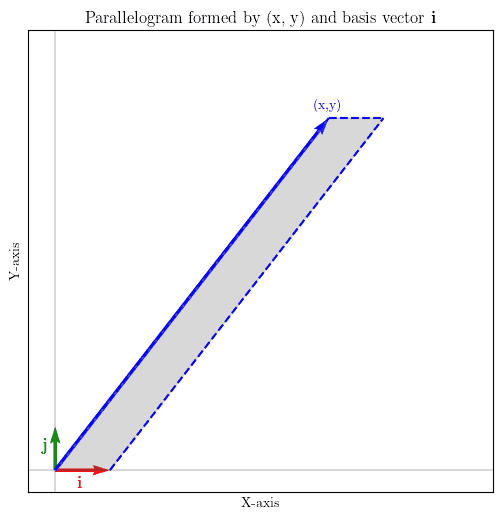
We know that the basis vector is unitary, and the height of the parallelogram is . So, we can compute its area as:
![\[Area = 1 \cdot y\]](/wp-content/ql-cache/quicklatex.com-b3d7e98b0eff7751fc88a5edf9b154cf_l3.svg "Rendered by QuickLaTeX.com")
Although it’s an area, we should maintain the sign of . So, a negative yields a negative area.
After applying , the area doesn’t remain the same. As we know, it gets scaled by the determinant of . So, in the transformed space, we have:
![\[NewArea = det(T) \cdot y\]](/wp-content/ql-cache/quicklatex.com-486ef28359d2df53a49edd1f93f8b52f_l3.svg "Rendered by QuickLaTeX.com")
and it holds that:
![\[y = \frac{NewArea}{det(T)}\]](/wp-content/ql-cache/quicklatex.com-605ffa27285b8946807e22eec47c63e3_l3.svg "Rendered by QuickLaTeX.com")
We can also visualize the transformation and check the parallelogram formed by  and
and ![[e,f]](/wp-content/ql-cache/quicklatex.com-7903845eef10ed1e8066a9c04c573132_l3.svg "Rendered by QuickLaTeX.com") :
:
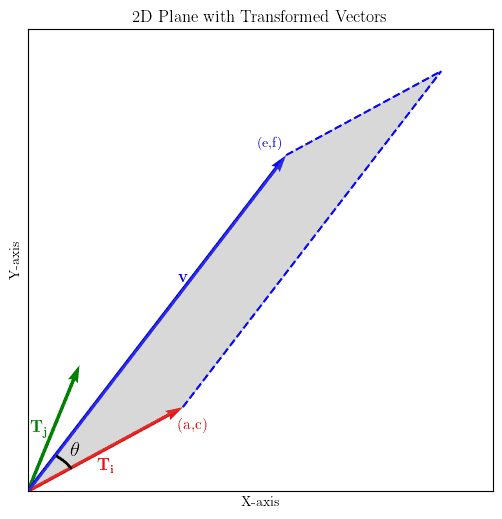
At this point, we can derive a formula to compute the new area similarly to what we did in the previous section. So we have that:
![\[NewArea = (\sqrt{a^2 + c^2}) (\sqrt{e^2 + f^2}) (\left|\sin(\theta)\right| )\]](/wp-content/ql-cache/quicklatex.com-bbca19ec1702b6f611c89932626fd021_l3.svg "Rendered by QuickLaTeX.com")
To compute the angle between two vectors and  , we use the dot product :
, we use the dot product :
![\[\mathbf{Ti} \cdot \mathbf{v} = |\mathbf{Ti}| \times |\mathbf{v}| \times \cos(\theta)\]](/wp-content/ql-cache/quicklatex.com-a865fcadd478b47685300cdab61b379d_l3.svg "Rendered by QuickLaTeX.com")
Solving for , we get:
![\[\theta= \cos^{-1}\left(\frac{\mathbf{Ti} \cdot \mathbf{v}}{|\mathbf{Ti}| \times |\mathbf{v}|}\right)\]](/wp-content/ql-cache/quicklatex.com-30b74617f82e636d8365bca6c1d6d817_l3.svg "Rendered by QuickLaTeX.com")
The procedure is similar for . The only difference is that we consider the parallelogram formed by the unknown vector and the transformed basis vector  .
.
4. Example
Let’s apply this to our initial example:
![\[\begin{bmatrix} 3 & 1 \\ 2 & 3 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} 5 \\ 8 \end{bmatrix}\]](/wp-content/ql-cache/quicklatex.com-d3ef3beffc9def910795fd5ee65f58f1_l3.svg "Rendered by QuickLaTeX.com")
So, we know that with the transformation, our unknown input vector lands on the output vector  . Finally, the basis vector lands on the coordinates defined by the first column of . So the parallelogram becomes:
. Finally, the basis vector lands on the coordinates defined by the first column of . So the parallelogram becomes:
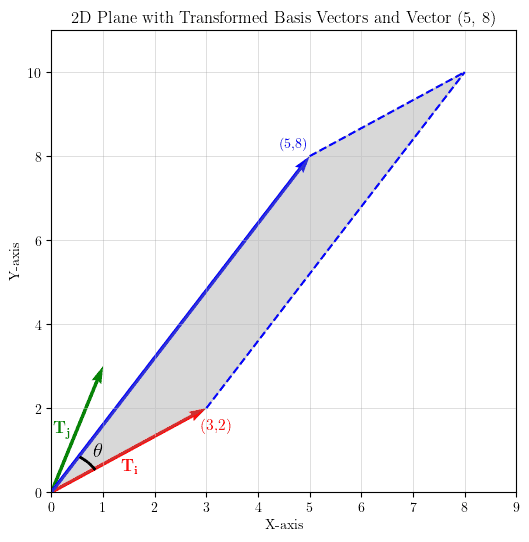
We can compute the angle with the dot product to obtain  .
.
To find , we compute the ratio of the new area and the determinant of :
![\[y = \frac{NewArea}{det(T)} = \frac{(\sqrt{a^2 + c^2}) (\sqrt{e^2 + f^2}) (\left|\sin(\theta)\right| )}{\begin{vmatrix} 3 & 1 \\ 2 & 3 \end{vmatrix} } =\frac{14}{7} = 2\]](/wp-content/ql-cache/quicklatex.com-65e453dab0ec9d2908e369386b878c97_l3.svg "Rendered by QuickLaTeX.com")
If we do the same for , we get  . So, we obtained
. So, we obtained  as our unknown vector, which is identical to the result we got with Cramer’s rule.
as our unknown vector, which is identical to the result we got with Cramer’s rule.
5. Conclusion
In this article, we provided a geometrical interpretation of Cramer’s rule. We leverage that a transformation in two-dimensional space stretches all the areas by a factor equal to the determinant of this transformation’s matrix. The same reasoning extends to higher dimensions. In a three-dimensional space, the determinant of the transformation represents the factor by which volumes are scaled, and so on.