

Yes, we're now running our only Summer Sale. All Courses are 30% off until 20th July, 2026:
Differences Between Firmware and Operating System
Last updated: March 18, 2024
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
1. Overview
In this tutorial, we’ll discuss the basics of firmware and operating systems.
Furthermore, we’ll present the key differences between them.
2. Introduction to Firmware
Firmware belongs to a special class of computer software that consists of machine-level instructions for specific hardware devices. It helps hardware to function correctly and communicate with the other hardware as well as software.
Generally, we incorporate it into a specific area of the hardware components. Additionally, firmware serves as a guide for hardware devices. An example of firmware is the BIOS of the computer. Furthermore, it contains several essential functions and serves as a backbone for the operating system.
Devices such as cameras, stoves, refrigerators, and electronic gadgets require firmware. When users provide instructions, the integrated codes enable these gadgets to work on the specific task. Thus, firmware may be used for both electronic and computing equipment. Furthermore, firmware can act as an operating system for simple and less sophisticated systems.
Firmware can carry out simple operations and contains low-level programming algorithms. Additionally, it’s limited to controlling specific hardware parts. Every piece of hardware may have a unique set of unaltered codes. Furthermore, the hardware component can interpret these programs because they’re written in assembly language.
3. Development Process of Firmware
The life cycle of firmware consists of six processes:
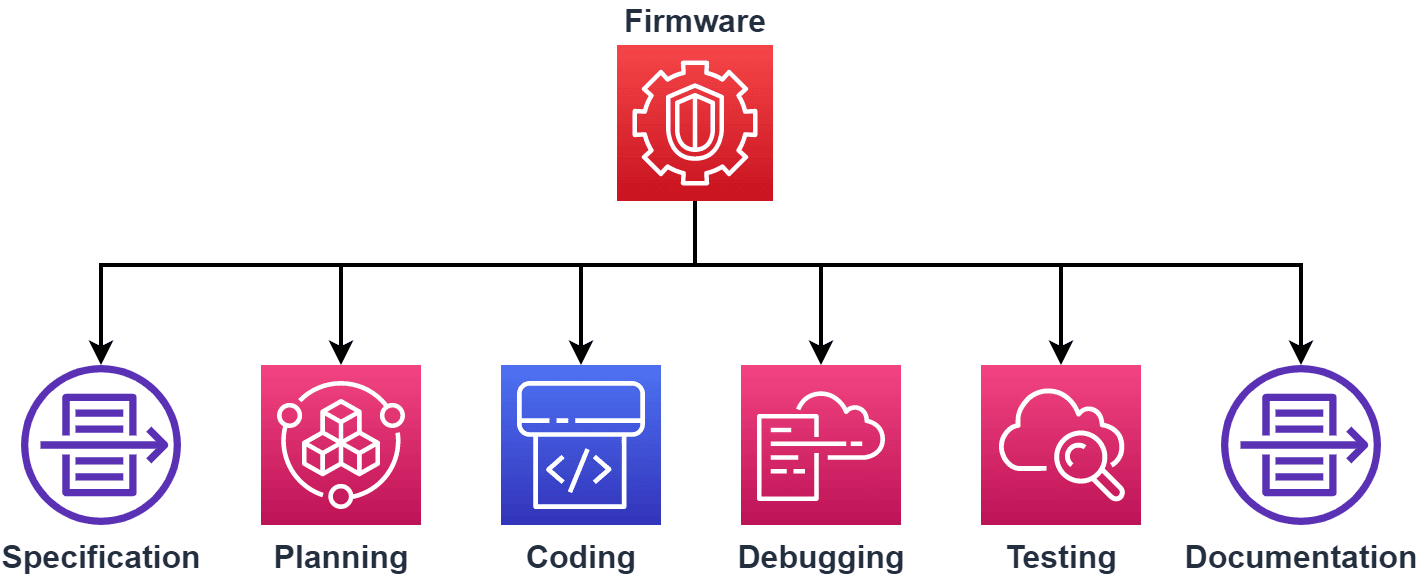
Specification deals with making a list of the standards, objectives, and requirements that a microcontroller must meet. It’s the first step in developing firmware. Furthermore, embedded firmware should be deterministic, predictable, secure, reliable, and reusable.
Additionally, strict guidelines must be followed when using embedded microcontrollers in safety-critical applications like vehicle engine control units or collision detection systems.
It’s feasible to guarantee the quality and performance of the firmware in terms of safety by adhering to coding standards like ISO 26262 or MISRA C.
The second phase is planning. Some embedded microcontrollers work using Real-Time Operating Systems (RTOS), while other uses threads that run in time-sliced order. When using RTOS scheduling, separate thread execution may alter the register value of an embedded unit. Hence, as a result, the firmware may become slow and complex.
Therefore, the RTOS scheduler requires careful design and planning. Additionally, we need to ensure the timely completion of the software design process.
The third part is coding. C is presently the most widely used programming language for developing embedded applications. Furthermore, it’s possible to use simulation, emulation, FPGAs, or virtual platforms. However, more effort is necessary to make the co-development process a reality.
Increased firmware complexity and shorter time to market have fostered code reuse in the firmware industry. A correctly constructed low-level hardware abstraction layer can give developers reusable and portable code. Additionally, it comes with lower costs and fewer defects.
Traditionally, debugging is done using hardware simulators and assemblers. An integrated development environment (IDE) is used for the majority of debugging. Additionally, we can utilize the built-in simulator with software simulation to replicate read or write memory access in the microcontroller like ARM Cortex-M.
Correct source code commenting is required for program reuse. Doxygen is popularly used to generate the appropriate technical documentation from the source code. When there are numerous code versions in the coding repository, software version control should be used to verify that the intended piece of code is utilized.
4. Introduction to Operating System
Computer operating systems are some of the most complex things ever created. An OS allows several users and computer processes to share a CPU simultaneously, protect data from unauthorized access, and ensure the proper operation of various input/output devices.
High-level services provided by an operating system are implemented by complicated hardware being given precise instructions. Additionally, various software runs on the processor as programs in order to perform tasks for the users. In reality, a CPU cannot execute both the operating system and an application at the same time.
System design is complicated by the need to set up procedures that ensure an operating system will always reclaim control once an application executes. The functionality gap between services and hardware makes an operating system impressive. Furthermore, It offers high-level services over really low-level hardware.
Now let’s talk about the components of an operating system. Based on the operating system, the components can vary. In general, an OS consists of eight components: process management, I/O management, file management, network management, memory management, secondary storage management, security management, and common interpreter system:
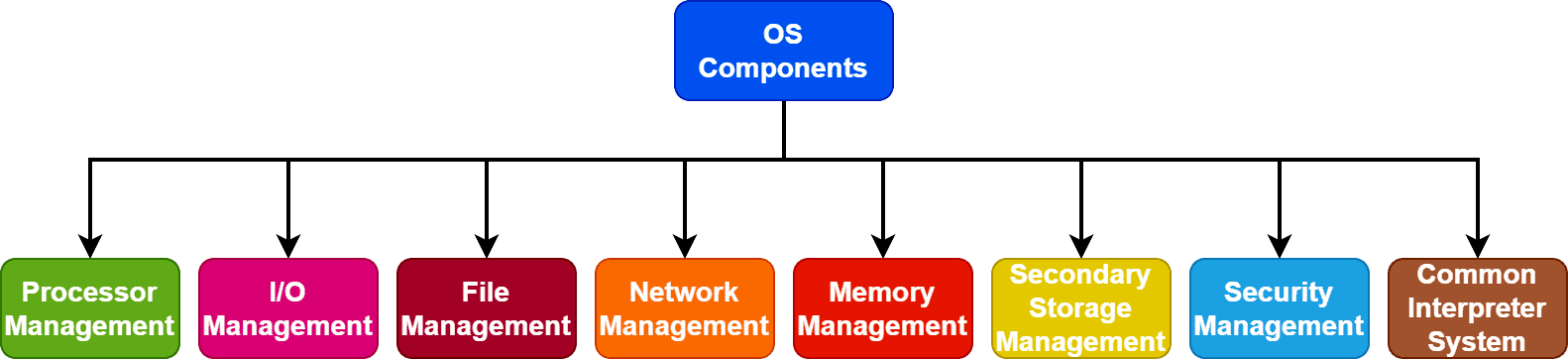
A process is nothing but a program that utilizes resources, including memory, I/O devices, and CPU time. It runs on the main memory to perform certain tasks. I/O management operates on the main memory and hides the hardware details of an operating system. File management is responsible for the creation of files and directories. It also helps in mapping files into secondary storage.
Furthermore, network management deals with network administration, security, and maintenance. Memory management is responsible for allocating and deallocating memory space. An operating system uses secondary storage to back up main memory. Security management deals with the authorization of memory allocation and access. Finally, the command interpreter system works as an interface for the user. Additionally, it allows interaction between the user and the operating system.
5. OS Design Goals
Let’s talk about various design goals an operating system needs to satisfy. Some essential goals are sharing resources, security, concurrency, portability, scalability, and backward compatibility.
The primary goal of an OS is to share resources between multiple user processes. Furthermore, sharing resources between multiple processes becomes complicated when multiple users use the same device. Providing security and privacy to the users is vital for an operating system. A user can keep confidential files and information on a computer. Without proper security, a malicious user can hack the users’ confidential information.
The modern operating system uses multi-core architectures which makes them highly complex. Using multi-core architectures, an OS can execute multiple processes simultaneously. One of the crucial design goals of an OS is portability. An OS should work on different devices regardless of the hardware and machines.
Scalability is an important goal of an OS. The user should be able to add or modify hardware as required. Hardware or software changes shouldn’t impact the performance of an OS. Another important aspect that an OS should contain is backward compatibility. A modern OS should allow interoperability with an older legacy system.
6. Differences
Let’s talk about the core differences between firmware and operating systems:
| Firmware | Operating System |
|---|---|
| Part of software embedded in specific hardware | Acts as a conduit between the user and the system. It controls all operations |
| Kept in non-volatile memory such as ROM | Resides on hard or disk drive |
| Implementation using assembly or C language | Most of the OS implementation uses C or C++ language |
| Handle particular hardware elements | Manages several system components |
| Cannot be modified since it is integrated into the hardware | The user can modify the functionalities of an OS |
| Controls low-level actions, such as giving hardware a constrained set of instructions to carry out a fundamental task | Controls high-level activities like multitasking and giving the user a graphical user interface |
| Routers, video cards, keyboards, washing machines uses of firmware | Examples of operating systems include Apple, Linux, Windows |
| Single purpose program | Multi-purpose program |
| Small program | Very big program |
| Once developed not modified often | Updated regularly |
7. Conclusion
In this tutorial, we discussed the basics of firmware and operating systems.
Finally, we presented the key differences between them.