

Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
Last updated: March 18, 2024
Learn through the super-clean Baeldung Pro experience:
>> Membership and Baeldung Pro.
No ads, dark-mode and 6 months free of IntelliJ Idea Ultimate to start with.
In this tutorial, we’ll talk about the problem of finding the distance between the farthest pair of points from a given set of points.
First, we’ll define the problem and provide an example to explain it. Then, we’ll present two different approaches to solving it and work through their implementations and time complexity.
Suppose we have a set of  points in a cartesian coordinate on the
points in a cartesian coordinate on the  plane. We were asked to find the maximum distance between all the possible pairs of points. (Recall the distance between two points
plane. We were asked to find the maximum distance between all the possible pairs of points. (Recall the distance between two points  and
and  equals the Euclidean distance
equals the Euclidean distance  ).
).
Let’s take a look at the following example:
Given an  and points
and points  ,
,  and
and  :
:
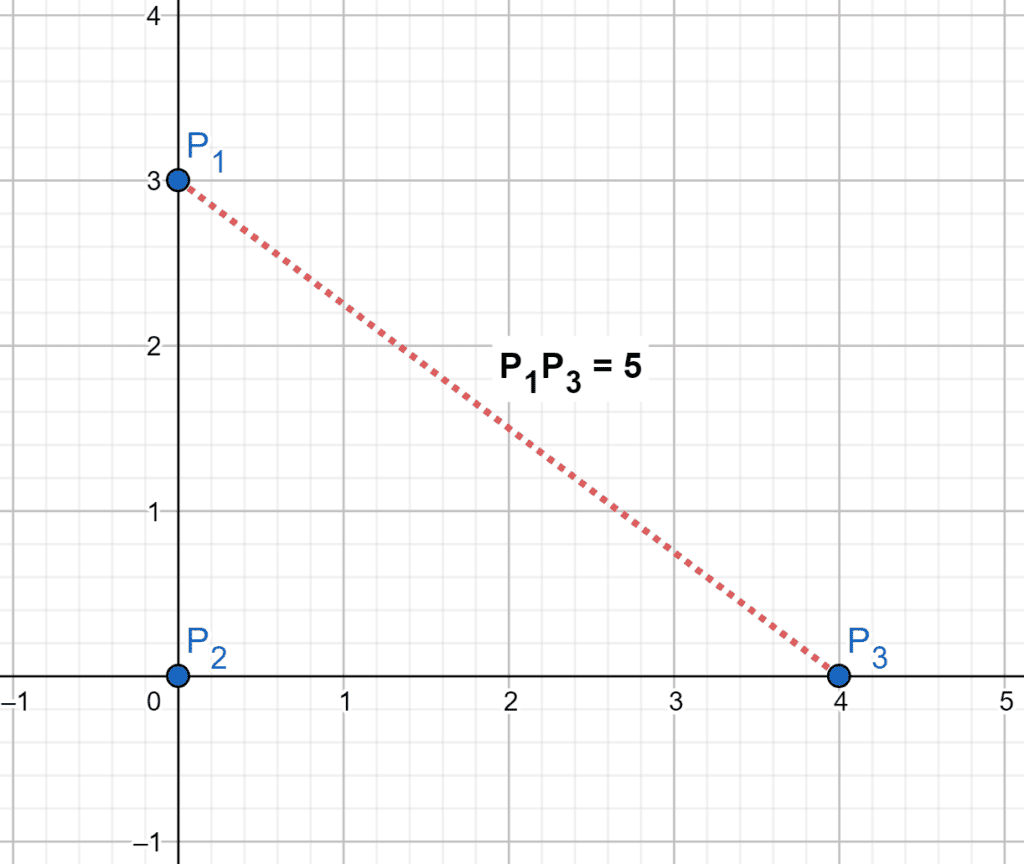 We have three possible pair of points:
We have three possible pair of points:
 with distance
with distance  .
. with distance
with distance  .
. with distance
with distance  .
.As we can see, the maximum distance is between points  and
and  , and it’s equal to .
, and it’s equal to .
The main idea of this approach is to brute force all the possible pairs of points and get the pair with maximum distance.
Initially, we’ll go through every point that could potentially be the first point in the desired pair. Then, we try it with all the other points for each point. After that, for each pair, we try to maximize the maximum distance that we have so far with the distance between the points of the current pair.
Finally, the answer will equal the maximum distance between all possible pairs of points.
Let’s take a look at the implementation of the algorithm:
algorithm NaiveApproach(Points):
// INPUT
// Points = a set of points on a 2D plane
// OUTPUT
// The maximum distance between a pair of points in Points
answer <- 0
for i <- 0 to length(Points) - 1:
for j <- i + 1 to length(Points) - 1:
if Distance(Points[i], Points[j]) > answer:
answer <- Distance(Points[i], Points[j])
return answerInitially, we declare the  function that will return the maximum distance between all possible pairs of points. The function will have one parameter,
function that will return the maximum distance between all possible pairs of points. The function will have one parameter,  , representing the given set of points.
, representing the given set of points.
Next, we declare  , which will store the maximum distance, and initially, it equals
, which will store the maximum distance, and initially, it equals  . Then, we’ll brute force all possible pairs of points. For each point, we iterate over all other points and check the distance between the points of the current pair. If the distance is greater than the current , we update to equal the distance between the points of the current pair.
. Then, we’ll brute force all possible pairs of points. For each point, we iterate over all other points and check the distance between the points of the current pair. If the distance is greater than the current , we update to equal the distance between the points of the current pair.
Finally, the will equal the maximum possible distance between any pair of points.
The time complexity of this algorithm is  , where is the number of the given points. This complexity is because, for each point, we are iterating over all other points.
, where is the number of the given points. This complexity is because, for each point, we are iterating over all other points.
The main idea behind this approach is that the most distance pair of points will be from the vertices of the convex hull of the given set of points, and the maximum distance we could get is equal to the diameter of that convex polygon.
We’ll split this approach into two phases:
Therefore, the maximum distance is the length of the convex hull’s diameter formed from the given set of points.
Let’s take a look at the implementation of building a convex hull algorithm:
algorithm ConvexHull(Points):
// INPUT
// Points = a set of points in the 2D plane
// OUTPUT
// CH = the convex hull vertices from the given set of points
start_point <- MinX(Points)
Points.remove(start_point)
polarSort(Points, start_point)
CH <- an empty list
CH.add(start_point)
for i <- 0 to length(Points) - 1:
while CH.size() >= 2:
size <- CH.size()
vec1 <- Vector(CH[size - 2], CH[size - 1])
vec2 <- Vector(CH[size - 2], Points[i])
if CrossProduct(vec1, vec2) <= 0:
break
CH.pop()
CH.add(Points[i])
return CHInitially, we have the  function that will return the convex hull vertices defined by the given set of points. The function will have one parameter represent the set of the given points.
function that will return the convex hull vertices defined by the given set of points. The function will have one parameter represent the set of the given points.
First, we declare the  , which will be the first vertex of the convex hull, and it’s equal to the point with the minimum value of x-coordinate since it’s an extreme point and we can guarantee that it’s from the convex hull vertices.
, which will be the first vertex of the convex hull, and it’s equal to the point with the minimum value of x-coordinate since it’s an extreme point and we can guarantee that it’s from the convex hull vertices.
Second, we remove the from the set, then we’ll sort the rest of the points with respect to the according to their slope:
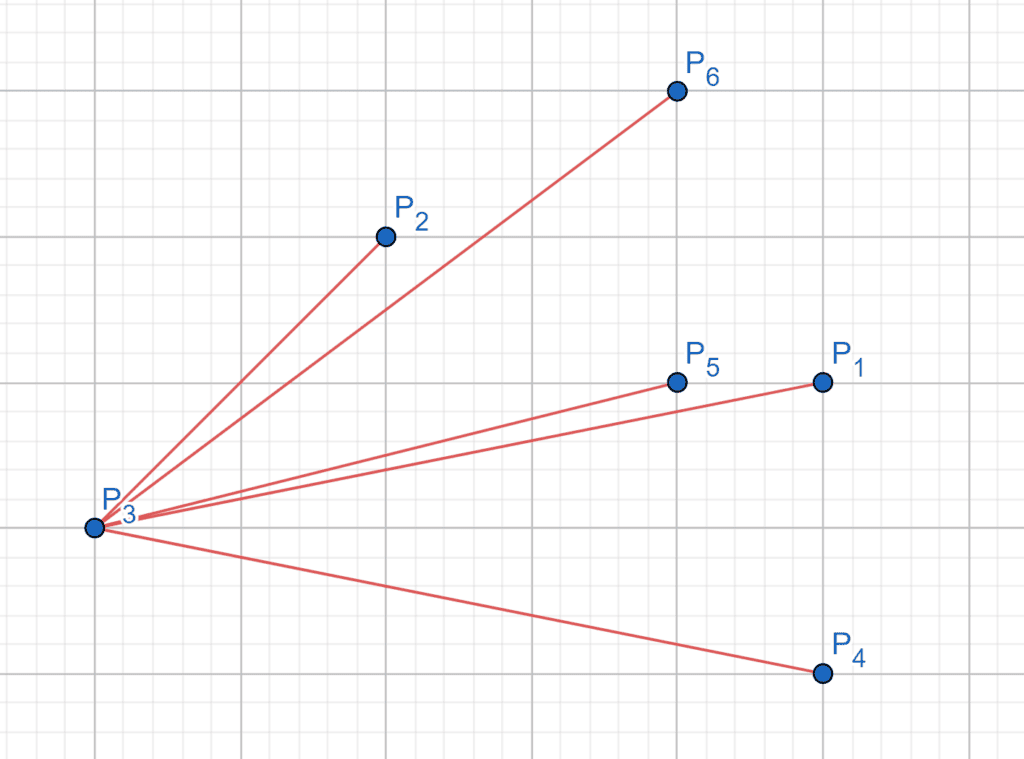
As we can see, the point is the since it’s the point with the minimum x-coordinate value, and the order of the rest of the points with respect to the according to their slopes will be  .
.
Third, declare the  list, which will store the vertices of the convex hull. We add the to since it’s from the convex hull vertices. Then, we iterate over the sorted points.
list, which will store the vertices of the convex hull. We add the to since it’s from the convex hull vertices. Then, we iterate over the sorted points.
We’ll make two vectors. The first one represents the vector between the last two points in the current convex hull, and the other one will be between the point before the last and existing points. For each point, while we have at least two points in the convex hull, we want to check if the last point is one of the vertices of the convex hull or not.
If the cross-product of these two vectors is less than or equal to zero, we’ll make a right turn by adding the current point. So, the last point is valid, and we break out of the loop. Otherwise, we make a left turn, which means the current point is better than the last one. So, we pop the last point out of the . In the end, we append the current point to the convex hull:
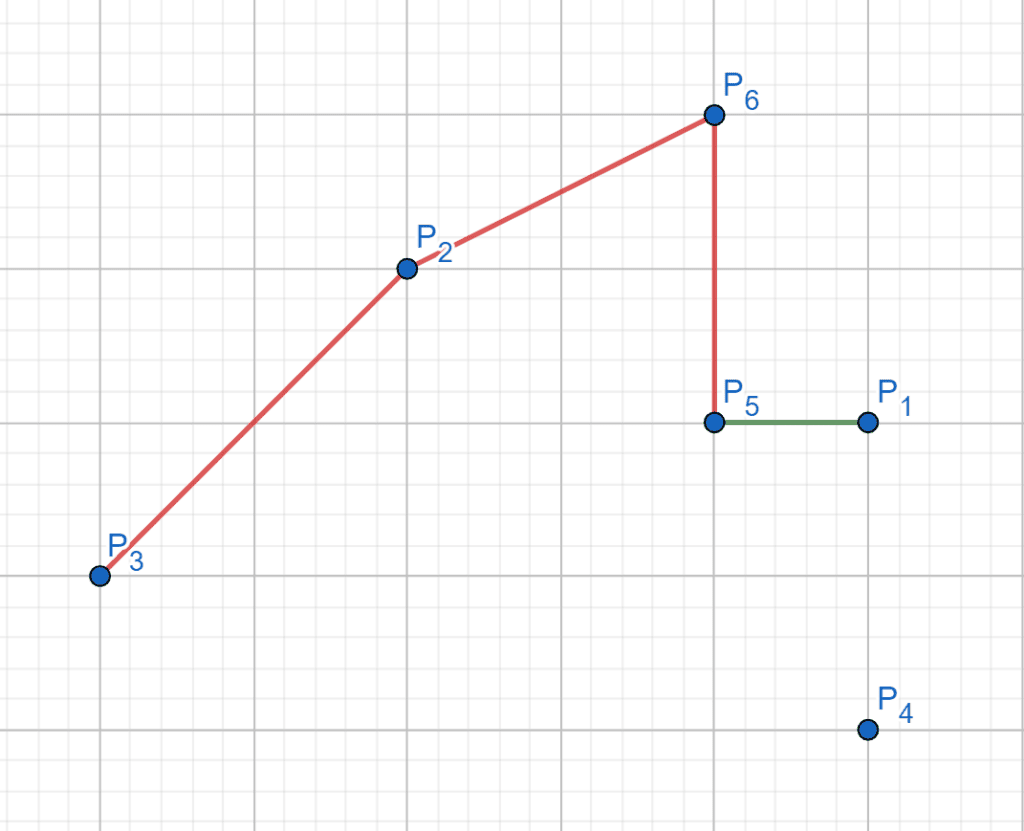
As we can see, the current have points ,  ,
,  and
and  . When we want to add to the convex hull, it will make a left turn with the last two points. Therefore, we pop the last point from the .
. When we want to add to the convex hull, it will make a left turn with the last two points. Therefore, we pop the last point from the .
Finally, the will have the vertices of the convex hull sorted in clockwise order.
Let’s take a look at the implementation of the algorithm:
algorithm RotateCalipersApproach(Points):
// INPUT
// Points = a list of points on the 2D plane
// OUTPUT
// The maximum distance between any pair of points
CH <- ConvexHull(Points)
N <- CH.size()
K <- 1
while K < N:
curArea <- Area(CH[0], CH[N - 1], CH[K])
nxtArea <- Area(CH[0], CH[N - 1], CH[K + 1])
if curArea > nxtArea:
break
K <- K + 1
P <- 0
Q <- K
answer <- Distance(CH[P], CH[Q])
while P <= K and Q < N:
while Q < N:
curArea <- Area(CH[P], CH[P + 1], CH[Q])
nxtArea <- Area(CH[P], CH[P + 1], CH[(Q + 1) mod N])
if curArea > nxtArea:
break
Q <- Q + 1
if Distance(CH[P], CH[Q mod N]) > answer:
answer <- Distance(CH[P], CH[Q mod N])
P <- P + 1
return answerInitially, we have the function as the previous approach. The maximum distance will equal the diameter’s length of the convex hull. In addition, the length of the diameter is equal to the maximum value among all the antipodal pairs’ distances. (Recall a pair of polygon’s vertices and called an antipodal pair if and lie on parallel tangent lines of support).
First, we have equal to the convex hull of the given points. Also, we declare , which is equal to the size of the convex polygon. Then, have a pointer  , representing the position of the farthest point to the line segment defined by the first point and the last point of the convex polygon, which will be an antipodal point with the first point.
, representing the position of the farthest point to the line segment defined by the first point and the last point of the convex polygon, which will be an antipodal point with the first point.
After that, we keep moving the pointer while the area of the ![Triangle(CP[0], CP[N - 1], CP[K])](/wp-content/ql-cache/quicklatex.com-53b8a4afd38a377398df1ce1081a50b5_l3.svg "Rendered by QuickLaTeX.com") is less than the area of
is less than the area of ![Triangle(CP[0], CP[N - 1], CP[K + 1])](/wp-content/ql-cache/quicklatex.com-224ee8396f596dce10cefe77214628aa_l3.svg "Rendered by QuickLaTeX.com") :
:
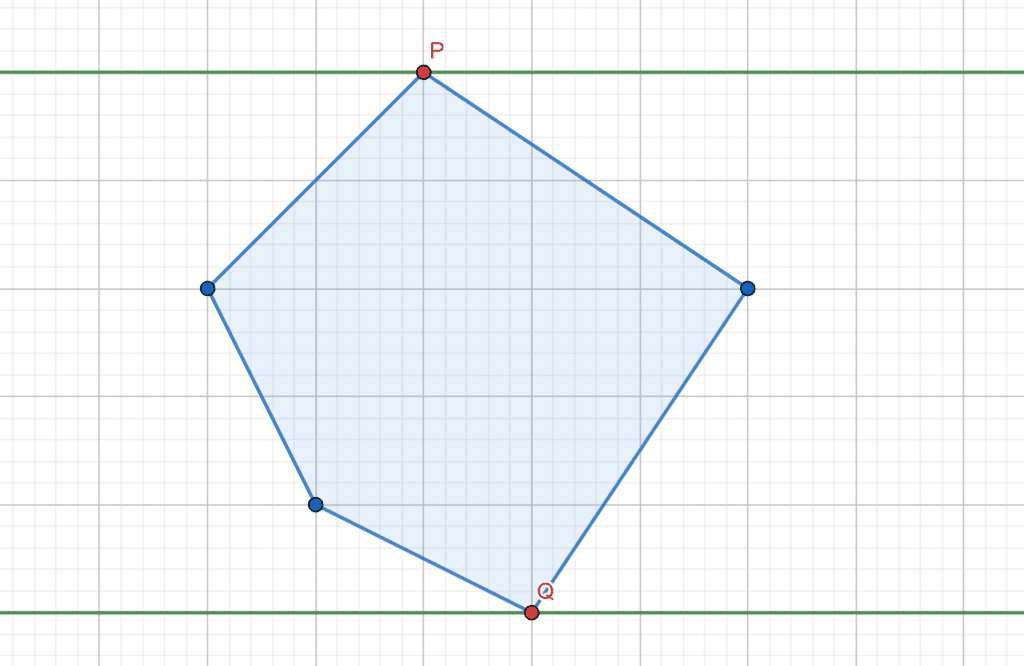
Second, we have an antipodal pair  and
and  , now we’ll use the rotate calipers technique to get all the antipodal pairs, while we’re moving the first pointer
, now we’ll use the rotate calipers technique to get all the antipodal pairs, while we’re moving the first pointer  , we’ll keep moving
, we’ll keep moving  to be as far as possible from segment
to be as far as possible from segment ![CH[P], CH[P + 1]](/wp-content/ql-cache/quicklatex.com-6f0592d2fc5f8bdd827678ac46c5cec7_l3.svg "Rendered by QuickLaTeX.com") . If the distance between the current antipodal pair is greater than the current , then we update the to be equal to that value.
. If the distance between the current antipodal pair is greater than the current , then we update the to be equal to that value.
Finally, the will equal the maximum possible distance between any pair of points.
The time complexity of this algorithm is  , where is the number of the given points. The reason behind this complexity is that the complexity of building the convex hull is
, where is the number of the given points. The reason behind this complexity is that the complexity of building the convex hull is  because we sort the points before building the convex hull.
because we sort the points before building the convex hull.
Also, the time complexity of the rotate caliper technique is  because each of the two pointers will pass on the polygon vertices at most once. Thus, the total complexity of this approach is .
because each of the two pointers will pass on the polygon vertices at most once. Thus, the total complexity of this approach is .
In this article, we discussed the problem of finding the distance between the farthest pair of points from a given set of points. We provided an example to explain the problem and explored two different approaches to solve it, where the second one had a better time complexity.
Finally, we walked through their implementations and explained the idea behind each of them.